

Rigid body positioning and attitude determination method based on direction of arrival under single base station
A single base station, rigid-body technology, applied in directions such as direction finders, positioning, and radio wave measurement systems using radio waves, it can solve the problems of complex positioning and attitude measurement models required for clock synchronization, affecting accuracy, and a large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
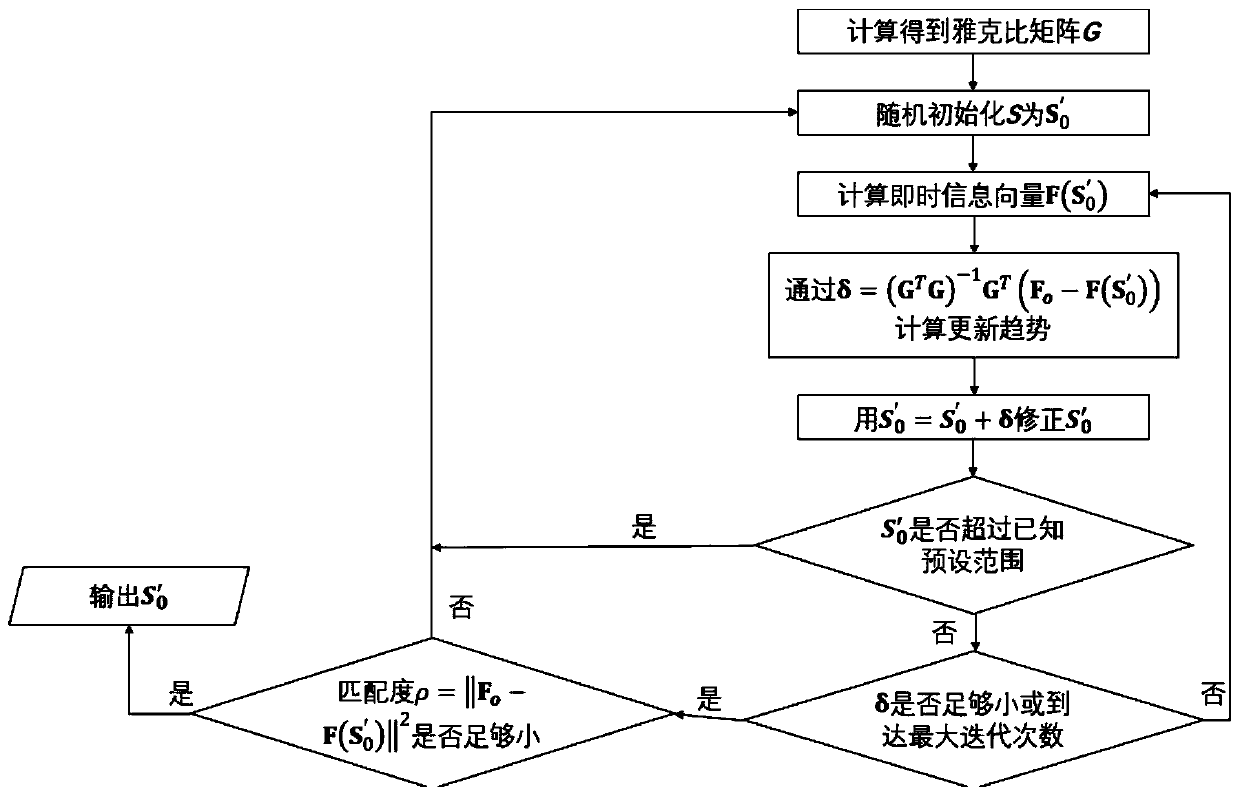
[0075] This embodiment provides a rigid body positioning and attitude measurement method based on the angle of arrival under a single base station. The method flow is as follows figure 1 As shown, the method includes:
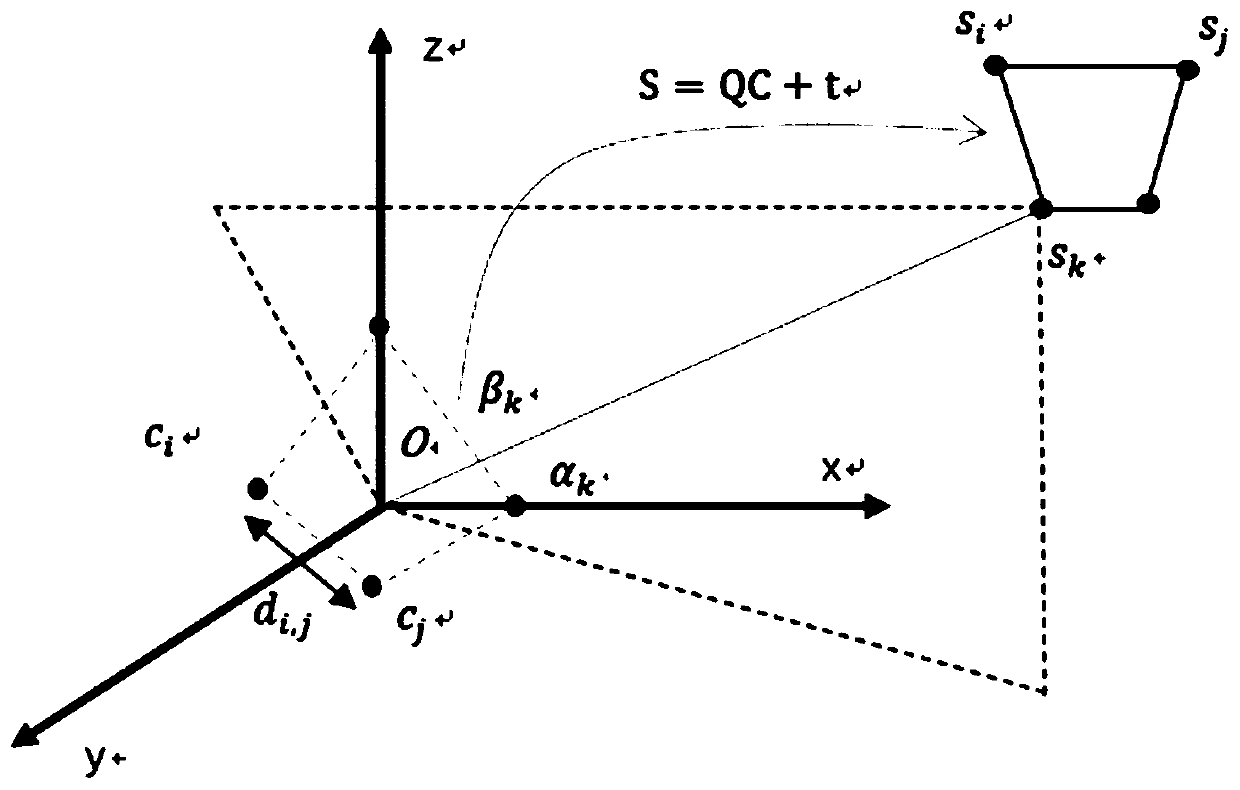
[0076] Step 1: Establish a local coordinate system.
[0077] A local coordinate system is established with the position of the single base station used as the center of the circle, with the direction perpendicular to the horizontal plane as the z-axis, the due east direction as the y-axis, and the due south direction as the x-axis.
[0078] Step 2: Place the antenna array at the origin base station of the local coordinate system;
[0079] Measuring the two-dimensional angle of arrival of wireless signals requires that the antenna array elements be arranged on a two-dimensional plane, which can form a circle or a polygon; considering the cost, the L-type antenna element is the least required, so the L-type antenna is selected in this embodiment array.
[0080...
Embodiment 2
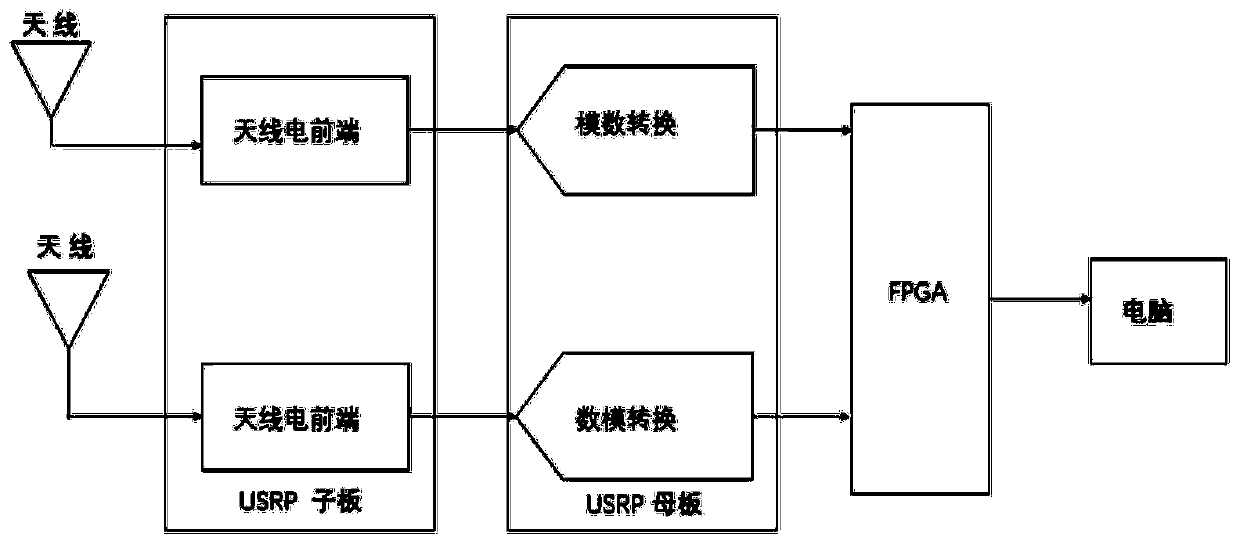
[0128] This embodiment provides a simulation application of the method for estimating the position and attitude of a rigid body based on the angle of arrival signal under a single base station. The hardware device is an Ettus Research USRP X310, which is a high-performance, scalable software-defined radio platform. The hardware structure combines two extended bandwidth daughter board slots covering DC-6GHz and baseband bandwidth up to 120MHz, multiple high-speed interface options and a user-programmable Kintex-7FPGA.
[0129] The USRP motherboard is connected to the supporting daughter board, the daughter board sends and receives signals, the motherboard performs analog-to-digital / digital-to-analog conversion, digital signal processing is performed in the FPGA, and the USB interface chip located under the FPGA communicates with the CPU. Its hardware structure diagram is as follows image 3 shown.
[0130] The antennas are distributed on the x-axis and the z-axis in an L shape...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More