Device for acquiring a position and orientation of an end effector of a robot
An end effector and manipulator technology, applied in manipulators, program-controlled manipulators, instruments, etc., can solve the problems of inability to use end effector position and positioning, high cost and high complexity, etc., to reduce visibility problems and improve accuracy. Sex, the effect of small deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
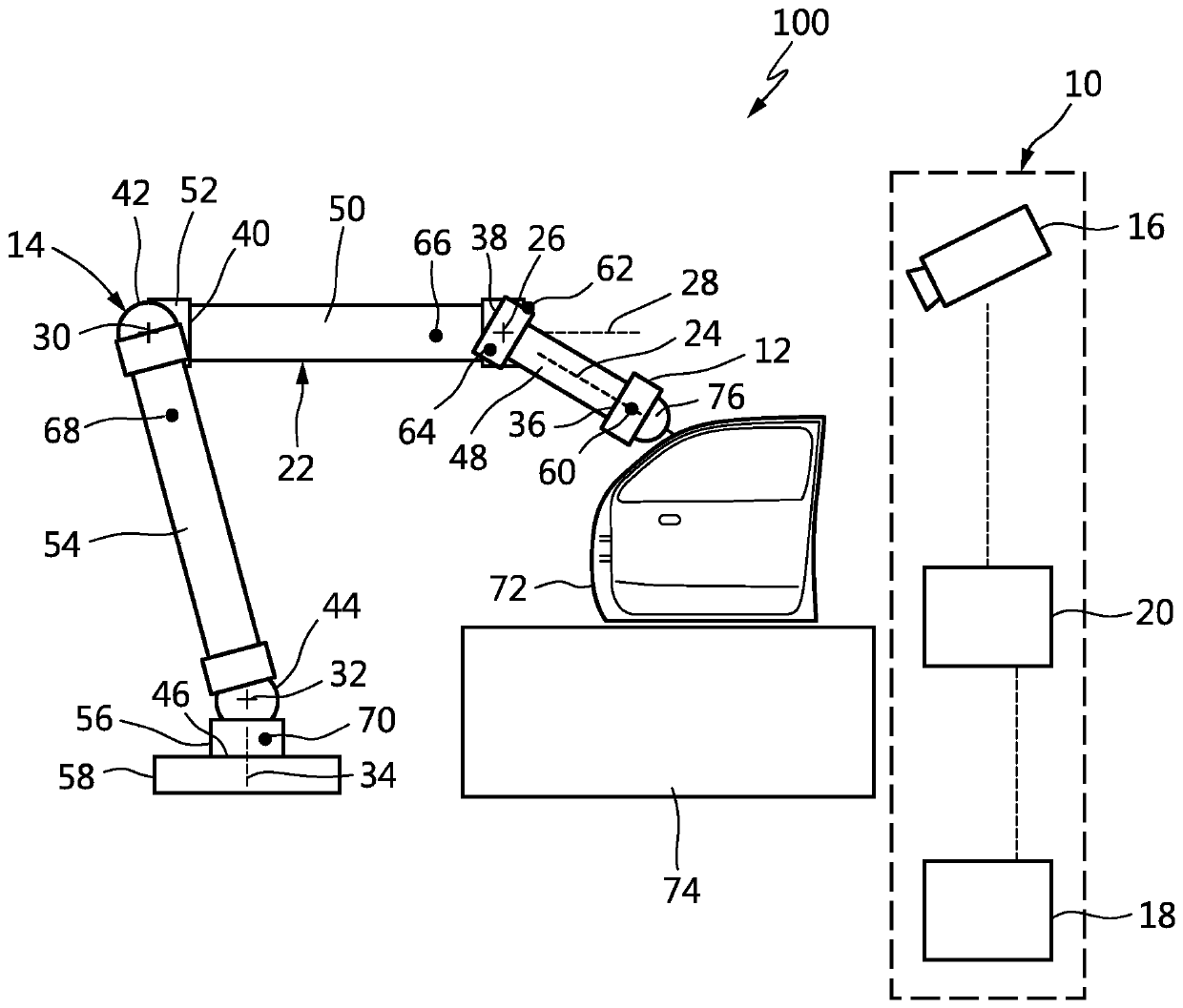
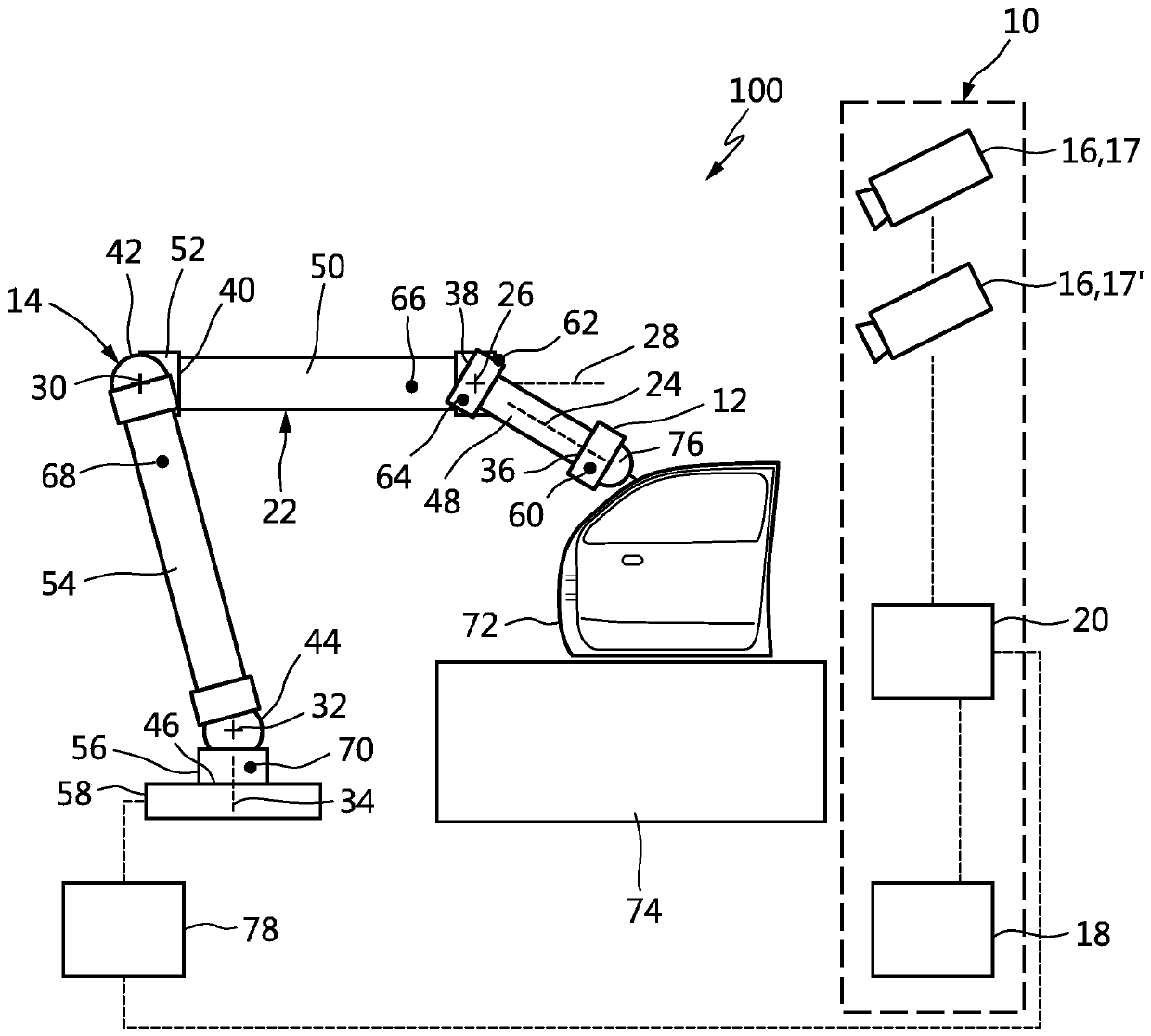
[0062] figure 1 A first exemplary embodiment of a device 10 for acquiring the position and positioning of an end effector 12 of a manipulator 14 is shown. The device 10 according to the invention has an optical sensor 16 . The optical sensor 16 may be, for example, a camera 17 or another sensor system for recording image data. In other exemplary embodiments, the optical sensor 16 can also have, for example, a plurality of optical sensors 16 which can be arranged, for example, in a common housing or be spatially separated from one another.
[0063] In addition to the optical sensor 16 , the device 10 according to the invention also has a storage unit 18 and an evaluation unit 20 .
[0064] The memory unit 18 can be designed, for example, as a hardware memory, such as a hard disk memory. In other exemplary embodiments, the storage unit 18 may also be designed in the form of, for example, a virtual storage (eg, cloud storage). The storage unit 18 can be arranged separately fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com