

Cooperative robot compliance force control method and system
A control method and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as high computational cost and difficult physical constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
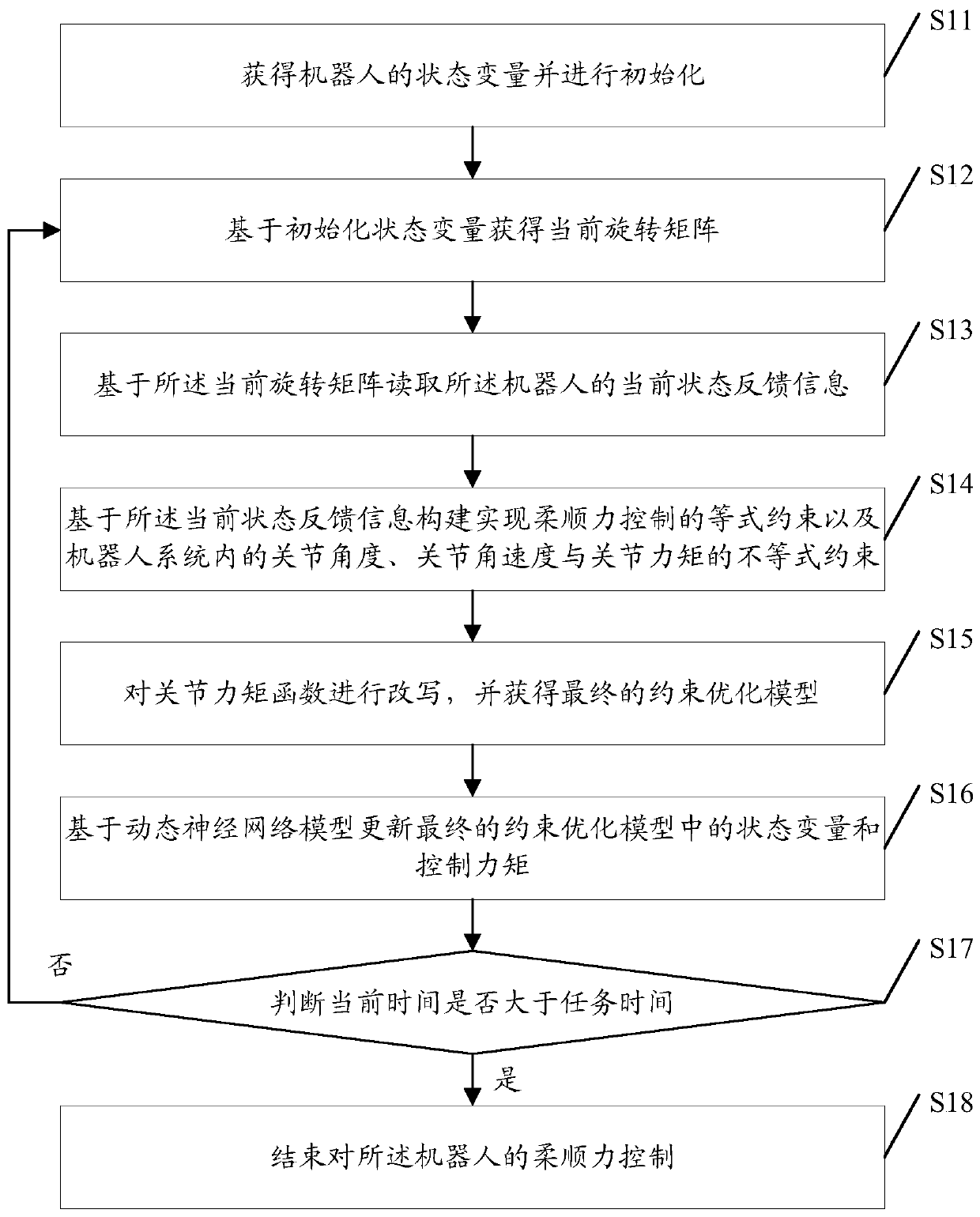
[0107] see figure 1 , figure 1 is a schematic flowchart of a method for controlling compliance force of a collaborative robot in an embodiment of the present invention.
[0108] like figure 1 Shown, a kind of cooperative robot compliant force control method, described method comprises:
[0109] S11: Obtain and initialize the state variables of the robot;
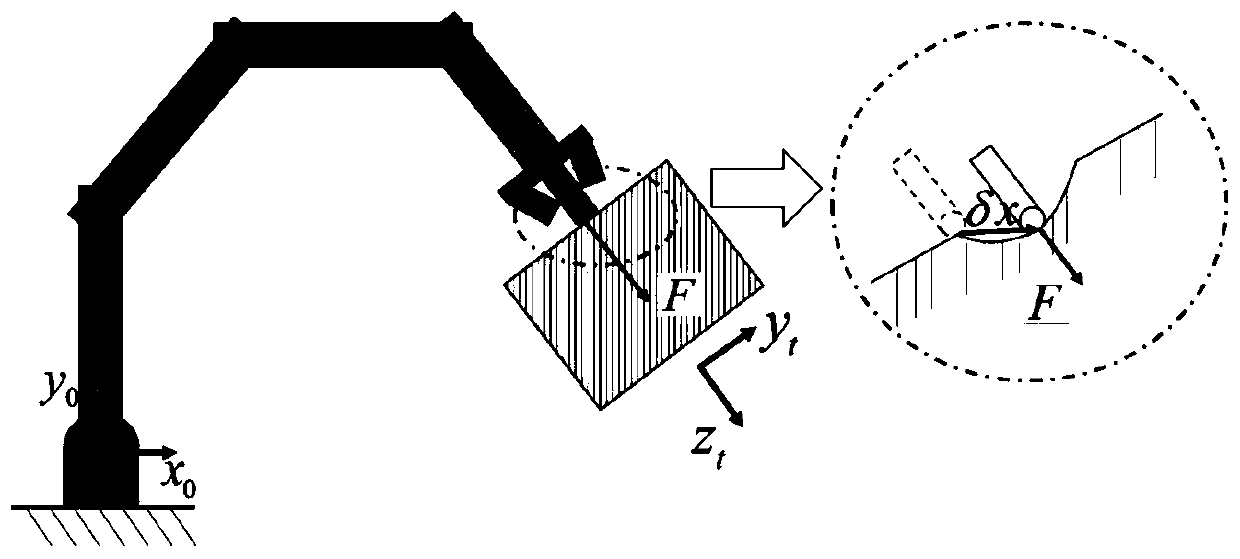
[0110] In the specific implementation process of the present invention, before the state variables of the robot are obtained and initialized, it also includes: aiming at the orthogonal characteristics of the contact force between the robot movement and the workpiece, in the tool coordinate system and the base coordinate system Carry out separate modeling to obtain the robot motion modeling system; where, the representation of the base coordinate system R 0 (x 0 ,y 0 ,z 0 ); the representation of the tool coordinate system R t (x t ,y t ,z t ).
[0111] Further, the contact force between the robot and the workpiece ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More