

Binocular vision positioning method for target grabbing of underwater robot
A binocular vision positioning and underwater robot technology, applied in the field of computer vision, can solve the problems of incompatibility between accuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
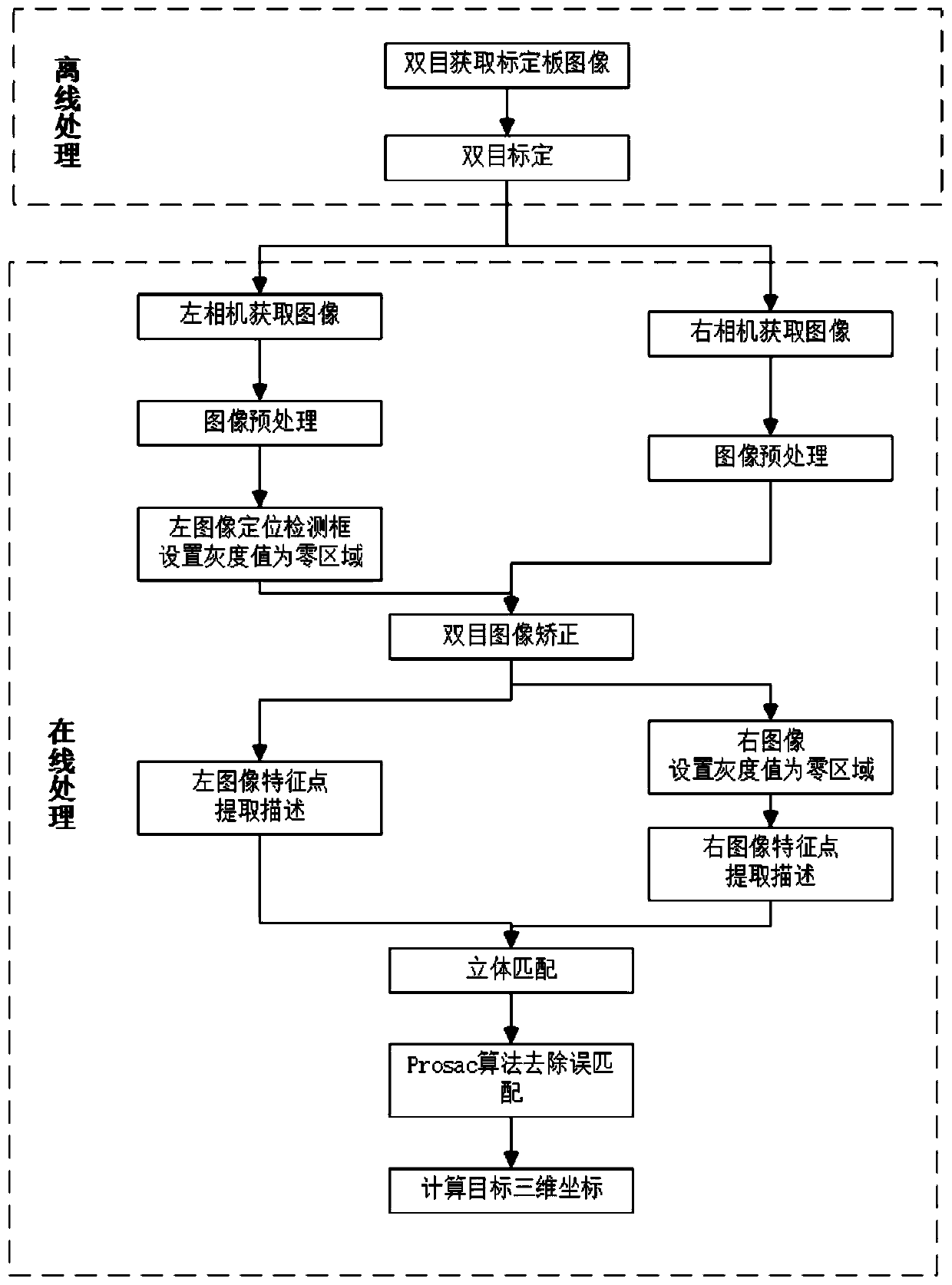
[0063] This example provides a binocular vision positioning method for underwater robot target capture, constructs a scale pyramid to extract FAST feature points, forms a LATCH binary descriptor for feature point matching, and uses the PROSAC algorithm to remove mismatches to obtain accurate parallax value, to solve the problem that the accuracy and speed of the existing technology cannot be balanced. Such as figure 1 As shown, the overall implementation process of the present invention is as follows:
[0064] Binocular calibration: Underwater offline calibration of the binocular camera according to the pinhole imaging principle, and calculate the internal parameter matrix, external parameter matrix, distortion coefficient, and rotation and translation matrix between the left and right cameras.
[0065] Target detection: online dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More