

Outdoor unmanned aerial vehicle positioning method and system based on LoRa
A positioning method and unmanned aerial vehicle technology, applied in radio wave measurement system, service based on location information, service based on specific environment, etc., can solve the problem that signal attenuation is greatly affected by environmental factors, distance error, and affect the accuracy of positioning results and other issues to achieve the effect of weakening the change of RSSI and position relationship, improving accuracy, and avoiding being easily affected by the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
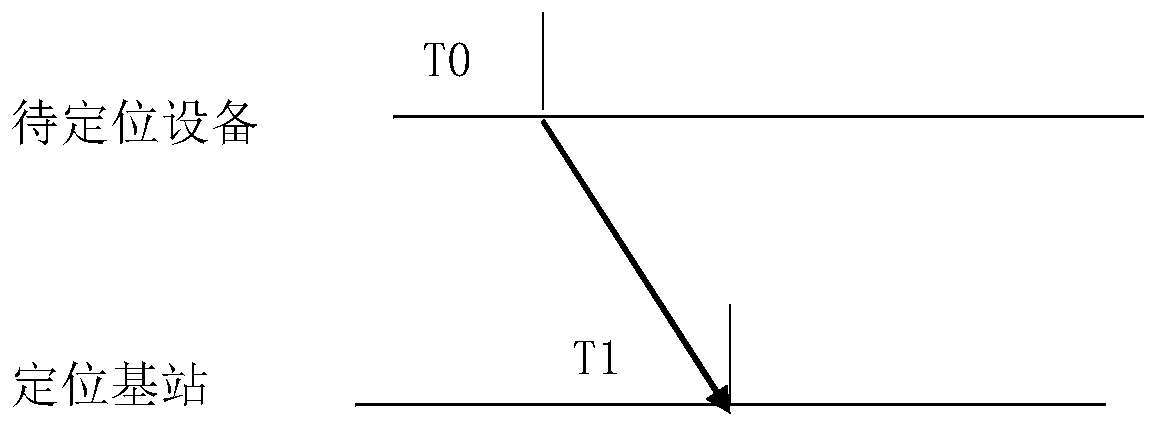
[0026] Since there are buildings, ground, etc. in the environment, the signal of the UAV will be reflected. Therefore, the signal received by the positioning base station in the non-line-of-sight transmission environment (nlos) may be the signal obtained without reflection, or it may be the signal after reflection. Signal. In order to effectively screen the signal, we take the reference value RSSI of the signal strength and the signal time-of-flight TOA as the input reference data at the same time. A LoRa-based outdoor UAV positioning method disclosed in the embodiment of the present invention is mainly divided into two steps: pre-establishing a fingerprint library and positioning.
[0027] Firstly, a fingerprint database is established, and the signal strength is measured within the range covered by the positioning base station. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More