Logistics robot capable of achieving quick responding and balancing and adjusting and control method of logistics robot
A logistics robot and fast-response technology, which is applied in the direction of motor vehicles, motion deposition, power devices, etc., can solve the problems of complex mechanism and slow adjustment platform speed, and achieve the effect of wide control range, fast response speed and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] In order to better illustrate this embodiment, some components in the drawings will be omitted, enlarged or reduced, and do not represent the size of the product; in the drawings, the power supply and integrated control circuit are not specifically marked, but only pointed out that their installation positions are located in the central processing In the device 7, the specific installation method is fixed by screw connection; for those skilled in the art, it is understandable that some known structures and their descriptions may be omitted in the drawings, such as the specific structure of the universal wheel.
[0059] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
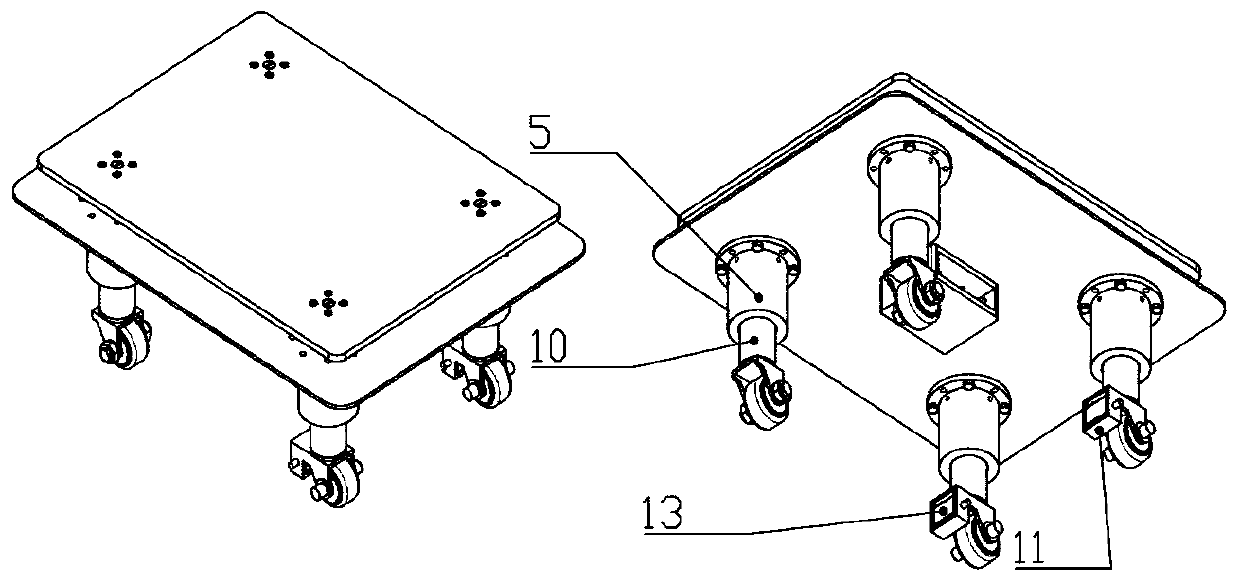
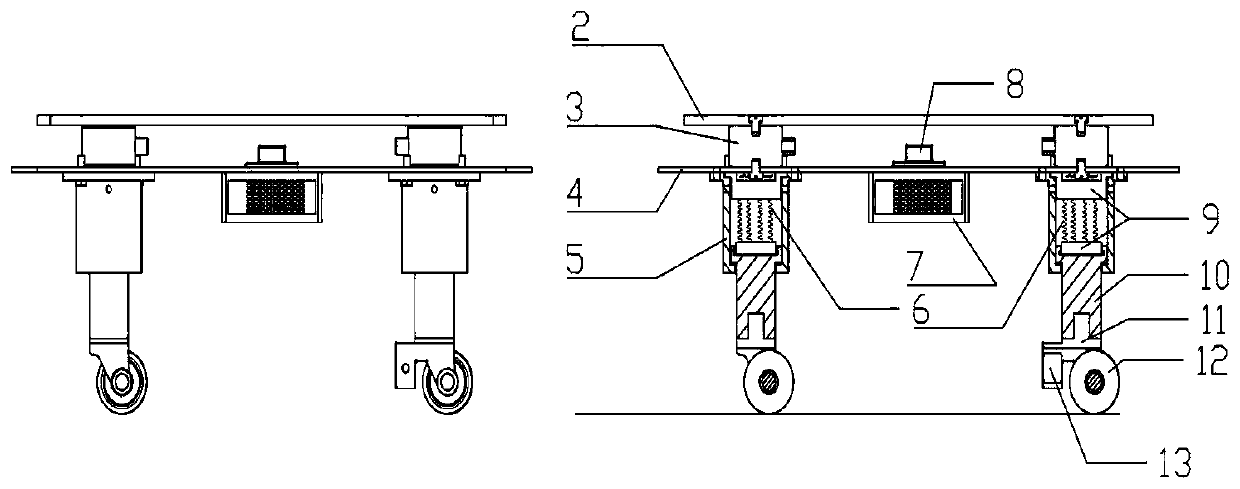
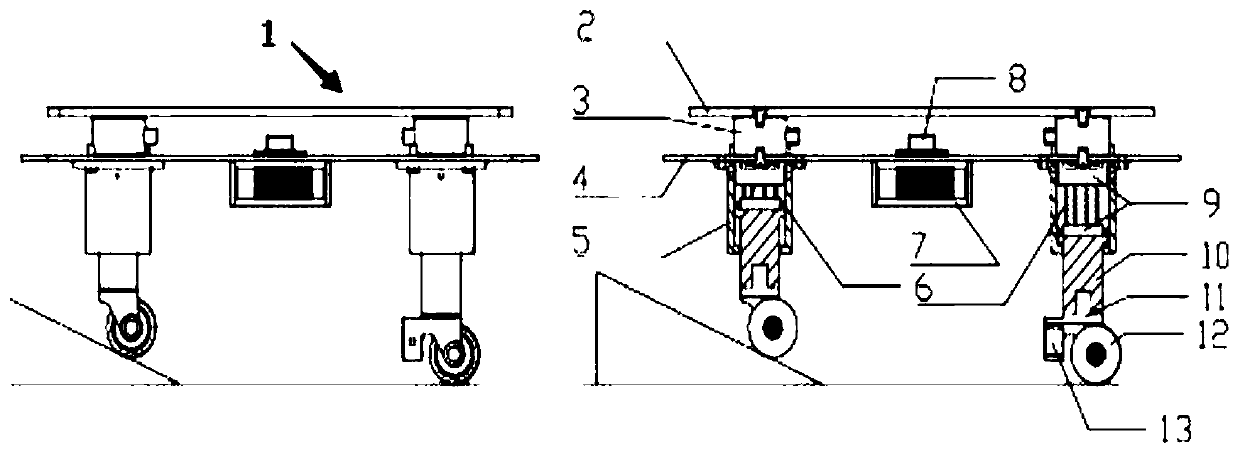
[0060] This embodiment discloses a fast-response balanced logistics robot 1, which includes a vehicle-mounted device, a data acquisition device, a central processing device 7 and an adjustment and balance device,...
Embodiment 2
[0075] This embodiment discloses a control method for a fast-response balance logistics robot, specifically a control method for cargo balance during movement. The specific process of the control method is as follows:
[0076] Step T1, first determine the size and cargo information of the logistics robot;
[0077] Step T2, the logistics robot is running, the inertial measurement unit transmits the real-time speed, acceleration, inclination, rotational speed and other information of the logistics robot to the central processing device in real time, and the central processing device judges the real-time motion states such as straight ahead, rotation and turning;
[0078] Step T3. After the central processing device determines the current state of motion, it simultaneously calculates the critical acceleration value of slipping and overturning instability under the current state of motion, and takes the smallest value of the two as the critical acceleration value of the dangerous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com