

Leg-foot type intelligent satellite surface detection robot sensing system and working method thereof
A perception system and robot technology, which is applied in the field of leg-foot smart star catalog detection robot perception system, can solve the problems that do not involve fine operation tasks such as sample collection and transfer of the mechanical arm, achieve low power consumption, avoid lens pollution, The effect of high measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below with reference to the drawings and specific embodiments.
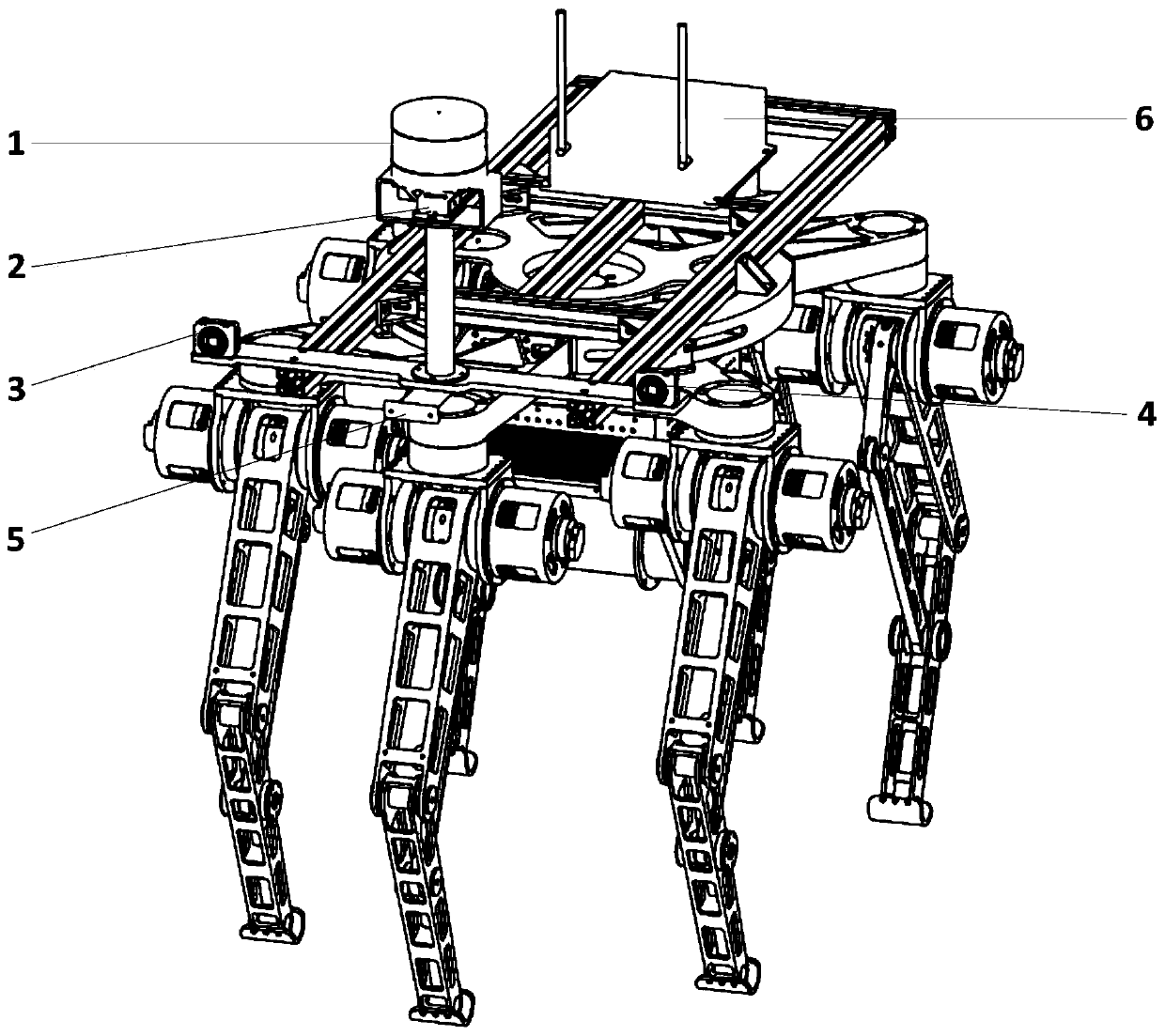
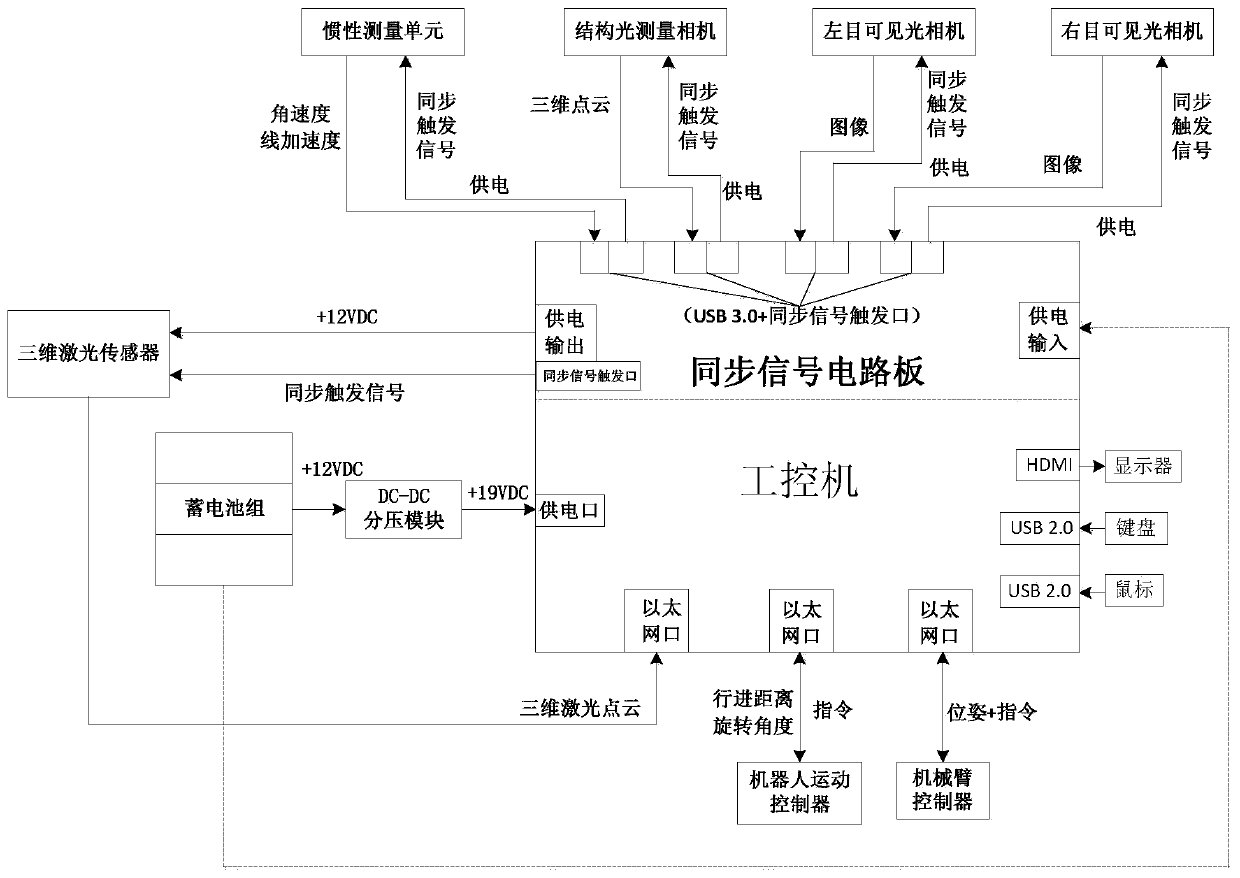
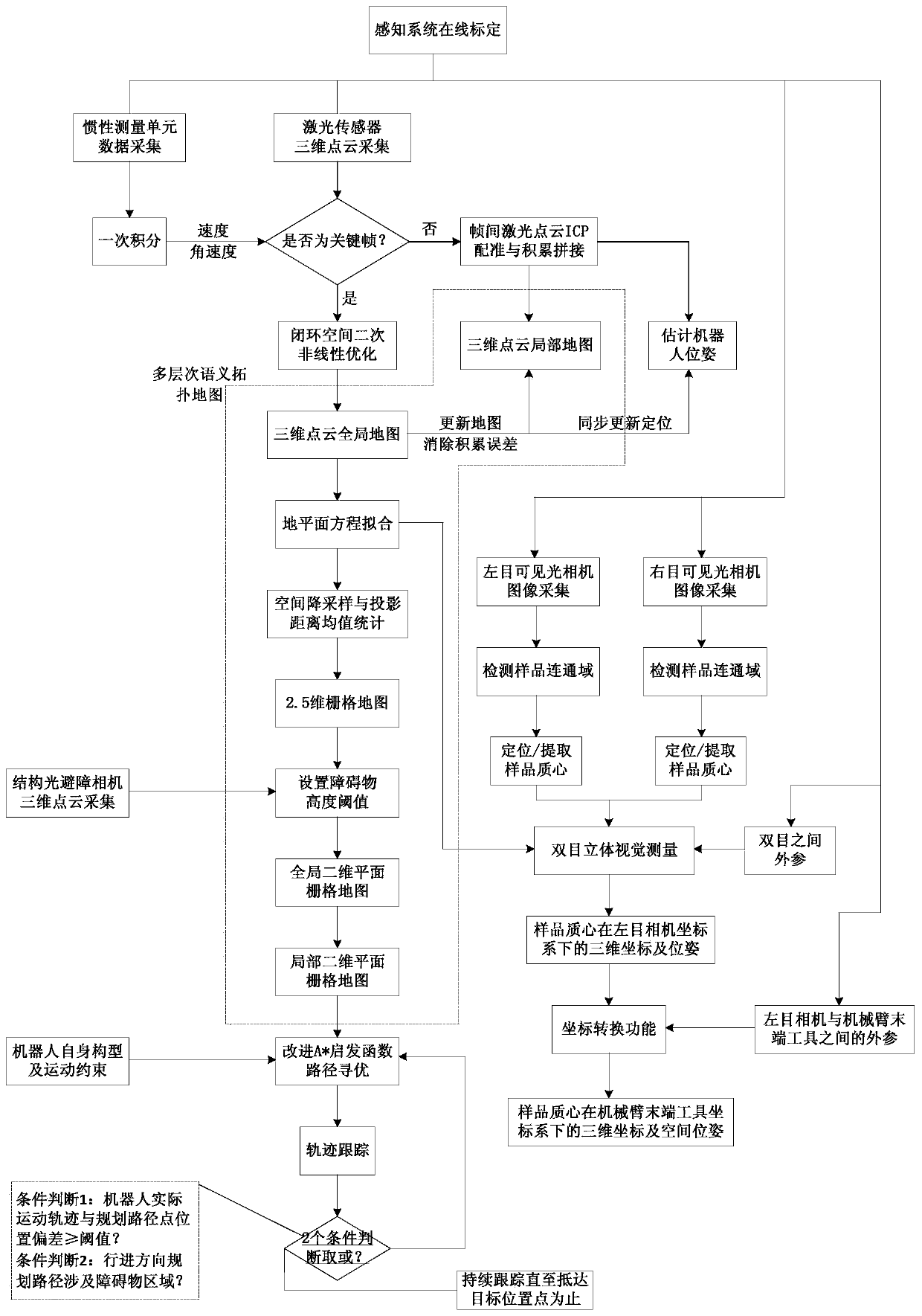
[0044] The invention relates to a leg-foot-oriented intelligent star watch robot sensing system and its working method. It applies a new type of intensive, lightweight, intelligent and refined multi-source sensing system, including a three-dimensional laser sensor, a left-eye visible light camera, and a right-eye visible light camera , Structured light measurement camera, inertial measurement unit, industrial computer. 1) Fusion of 3D laser sensors, structured light measurement cameras and inertial measurement units to achieve 3D reconstruction of complex terrain and landforms in the star catalog, construction of multi-level semantic topology maps, robot positioning, real-time detection of static / dynamic obstacles, and path based on robot motion constraints Functions such as optimization and trajectory tracking; 2) The binocular vision camera is used for high-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More