

Quadruped robot gait control method based on reinforcement learning and CPG controller
A quadruped robot and gait control technology, applied in the field of robotics, can solve the problems of robot overturning, large change range, low reproducibility, etc., and achieve the effect of stable torso, prevention of overturning, and small change range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
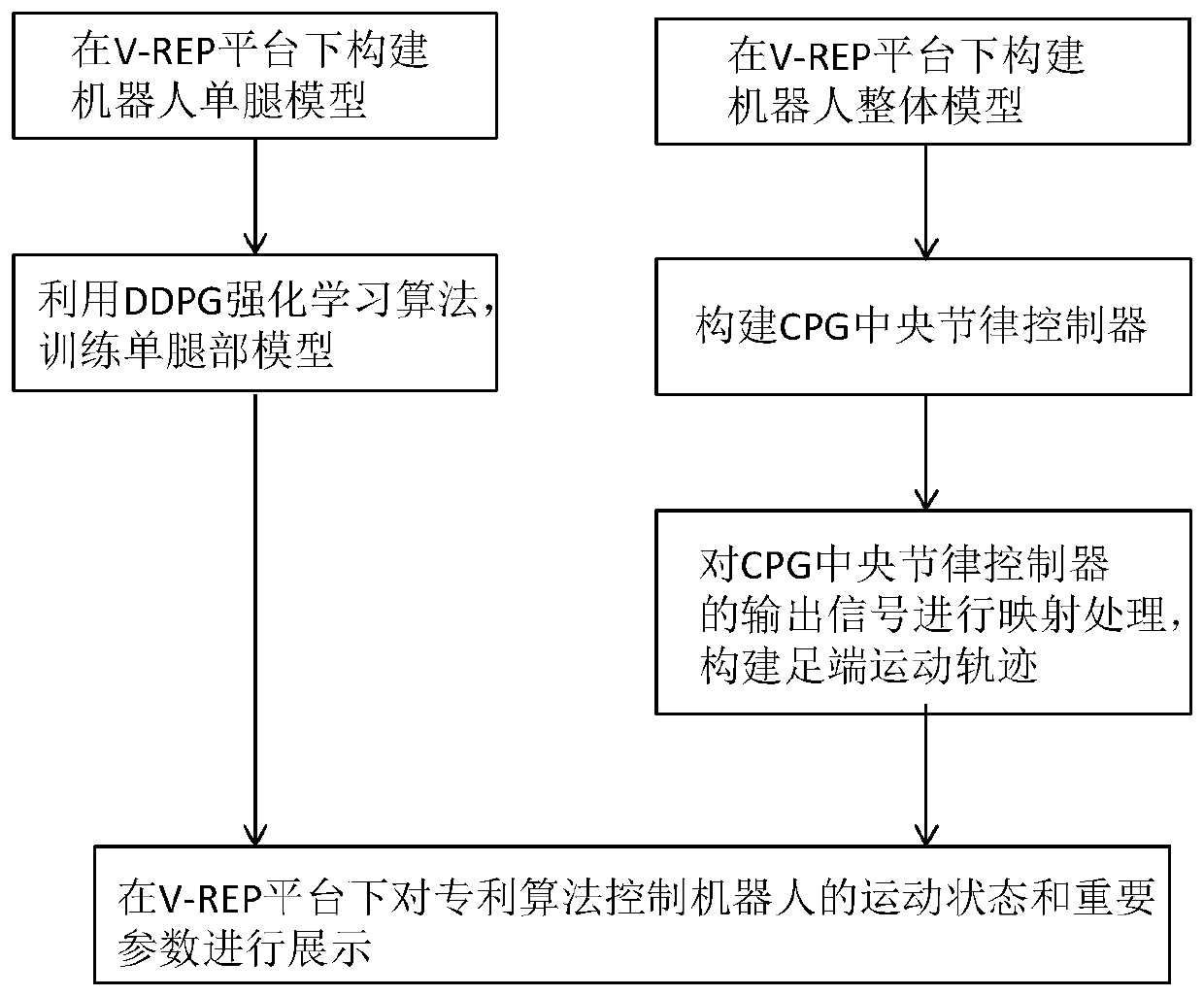
[0042] The present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
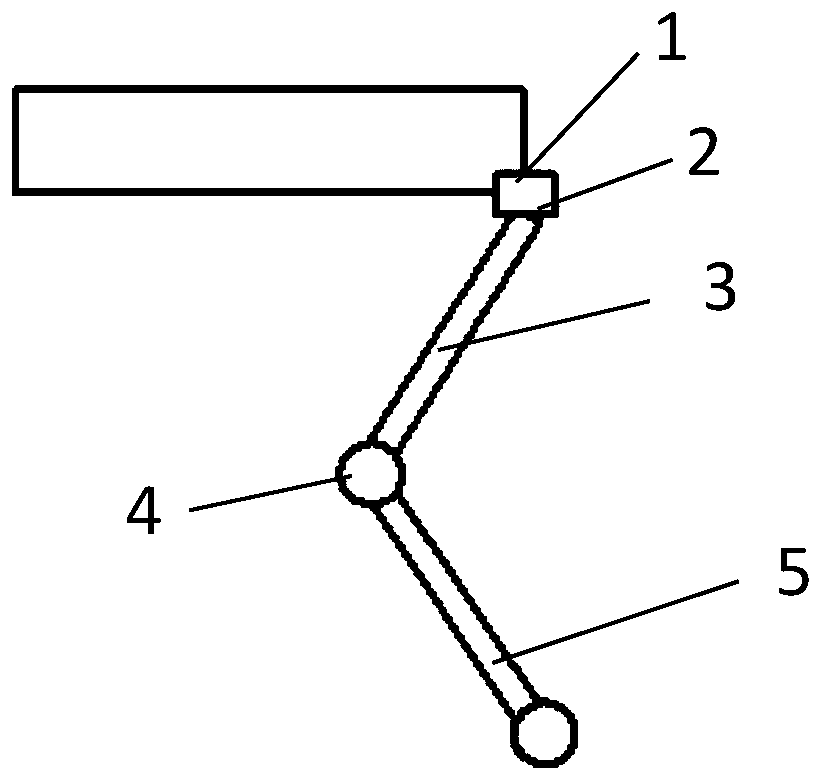
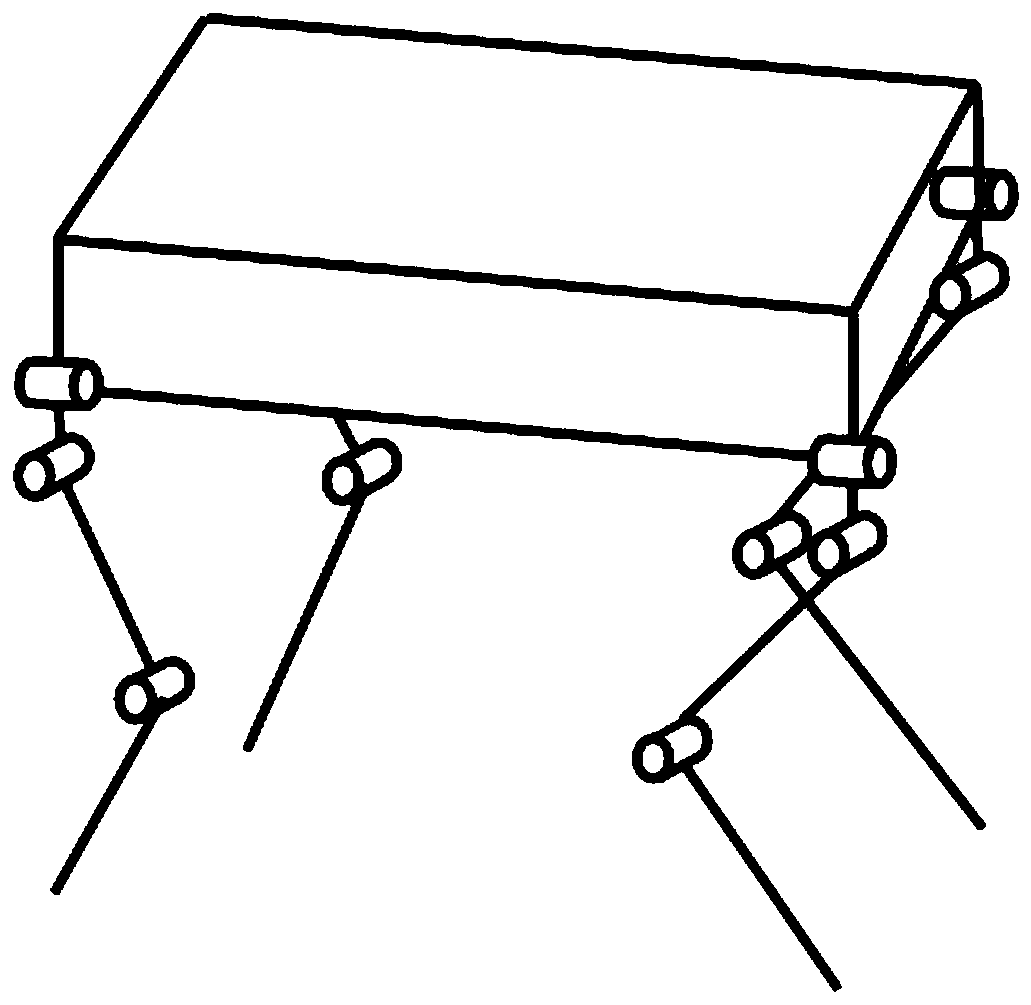
[0043] The design concept of the present invention is to assign an oscillator to each leg of a quadruped robot, and each oscillator has a strict phase relationship; for each leg, a reinforcement learning neural network is deployed to make the neural network The position autonomously plans a fast movement trajectory, so that the foot end of the leg reaches the target position as soon as possible.
[0044]Due to the development of the field of artificial intelligence, the theories in the field of deep learning and reinforcement learning have begun to be applied to robot kinematics planning. The characteristics of reinforcement learning, that is, there is no need to give a sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More