

Robot path planning method and system
A technology of path planning and robotics, applied to instruments, road network navigators, navigation, etc., can solve the problems of small application range and inapplicability to complex and high dynamic scenes, and achieve wide application range, improve efficiency, versatility, and high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
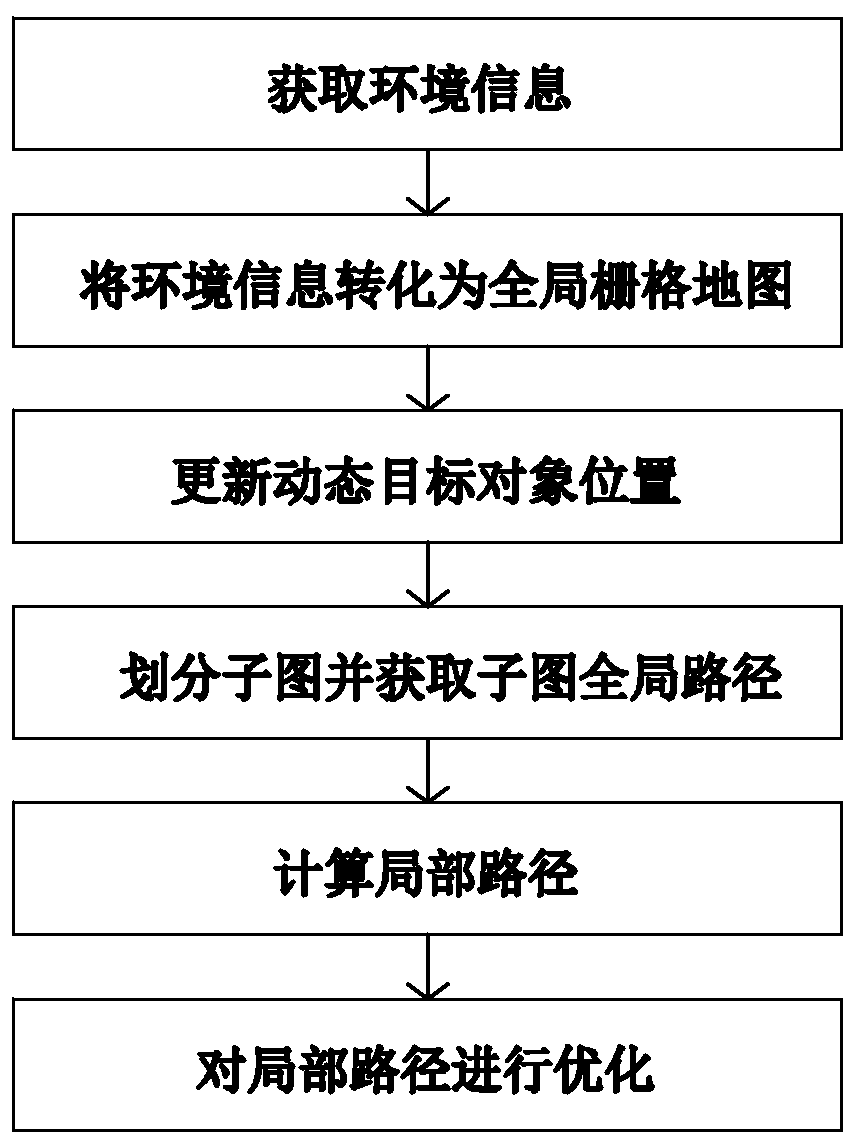
[0048] A robot path planning method, such as figure 1 Shown: Include the following steps:
[0049] S1: Use visual sensors to obtain environmental information in the robot running scene; when using visual sensors to obtain environmental information, use SFM (Structure from Motion, motion recovery structure) or visual SLAM (Simultaneous Localization and Mapping, simultaneous positioning and mapping) to obtain Environmental information based on visual landmark point cloud description. SFM is implemented through the development package openMVG, and visual SLAM is implemented through ORB-SLAM2 proposed by Raul Mur-Artal et al.;
[0050] S2: Convert the environmental information into a global grid map. The smaller the grid, the more accurate the trajectory of the robot based on the planning and processing of the global grid map. In this embodiment, the size of each grid is set to 5cm;
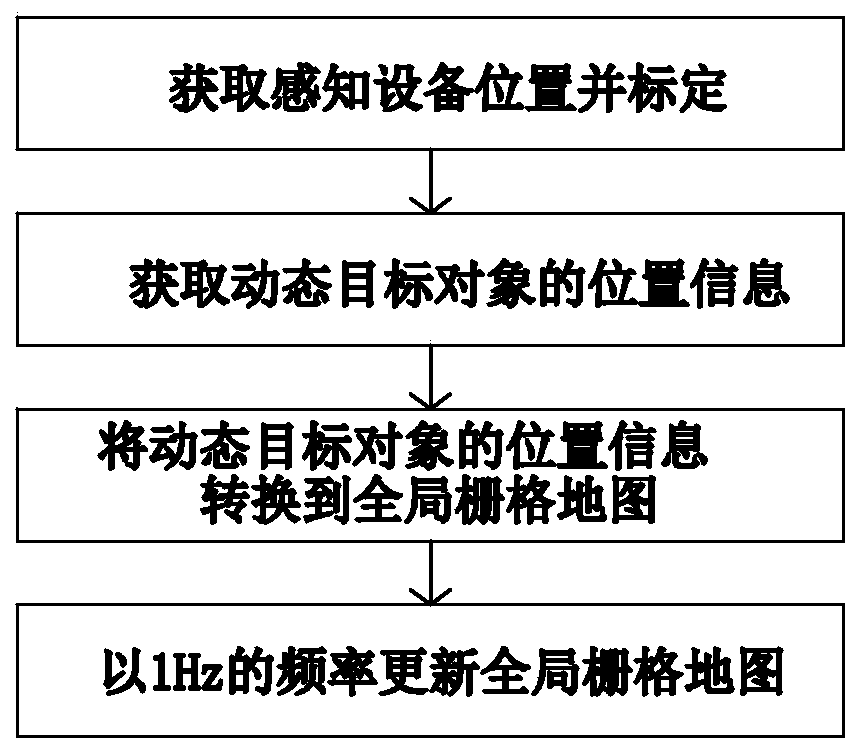
[0051] S3: Use the perception device to sense and obtain the dynamic target object in the runni...
Embodiment 2
[0071] The difference between this embodiment and Embodiment 1 is that this embodiment uses a laser radar sensor to obtain robot operation scene information.
Embodiment 3
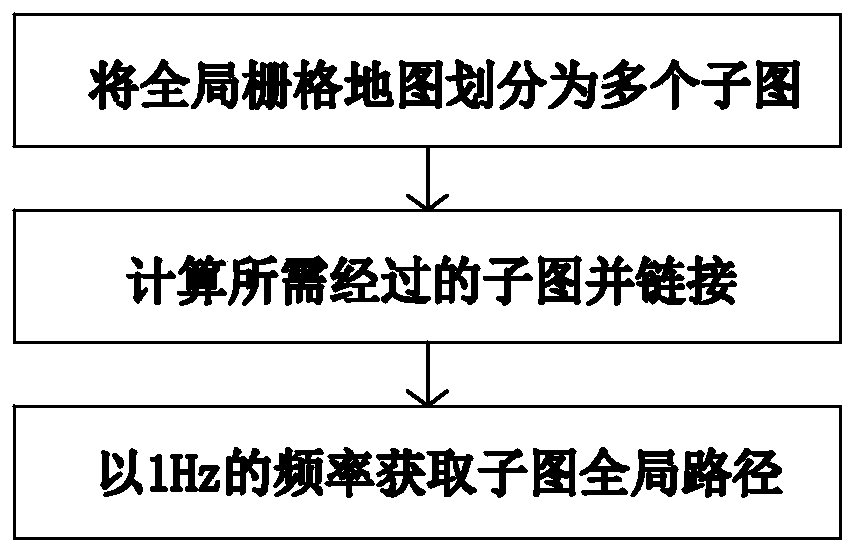
[0073] The difference between this embodiment and Embodiment 1 is that this embodiment uses the D* algorithm to calculate the global path of the subgraph.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More