

Unmanned aerial vehicle laser charging method based on binocular vision positioning
A technology of binocular visual positioning and charging method, applied in the field of remote charging, can solve the problems of low charging power and insufficient aiming accuracy, and achieve the effects of high charging efficiency, high aiming accuracy and improving flight time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
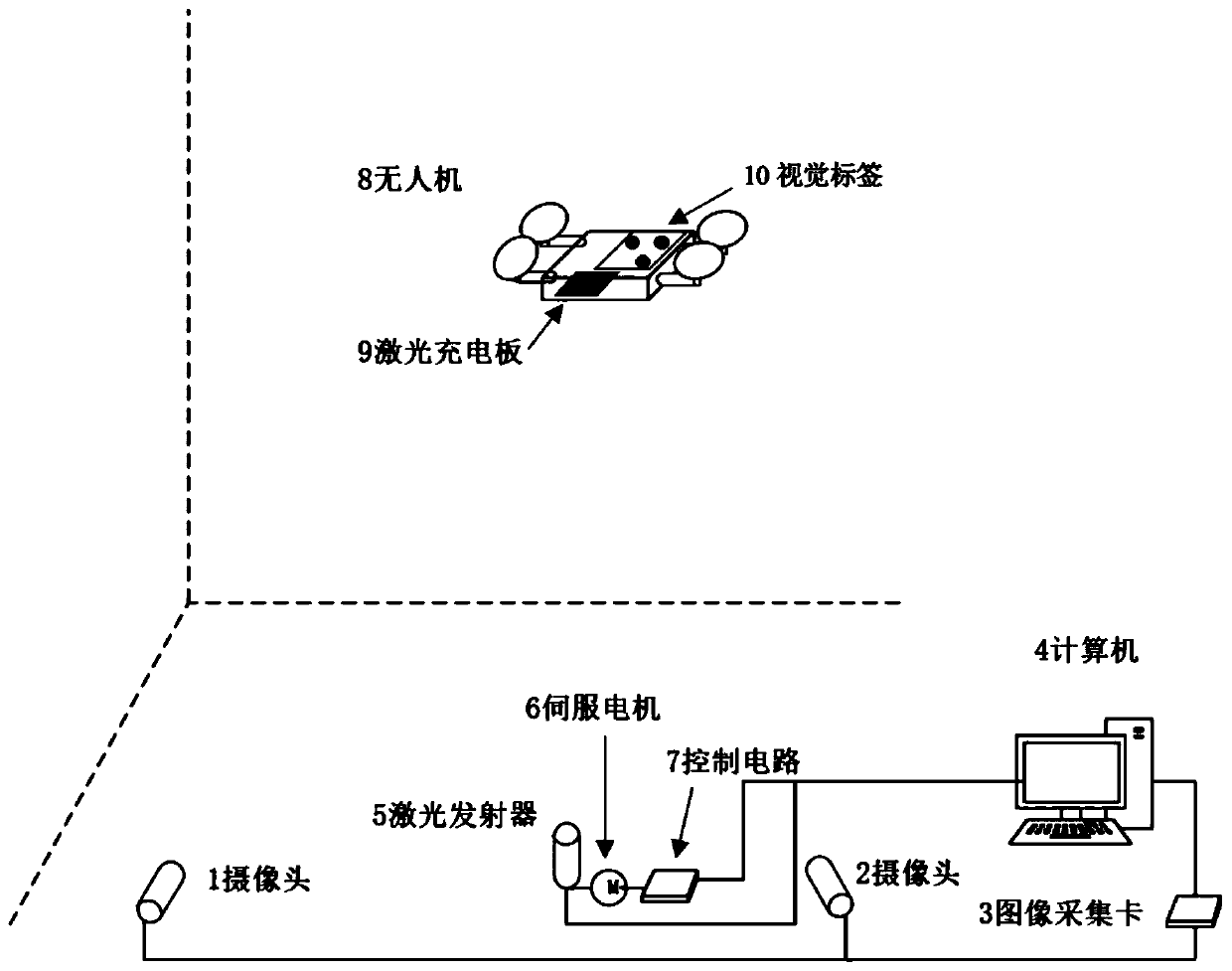
[0019] Such as figure 1 The schematic diagram of the realization of the UAV laser charging method based on binocular vision positioning is shown, including three parts: the UAV image acquisition and processing system, the laser tracking system, and the laser charging system. The UAV image acquisition and processing system includes a camera 1 , 2, image acquisition card 3, computer 4, visual label 10, used to collect UAV images and obtain its position and attitude information by computer processing; laser tracking system includes servo motor 6, control circuit 7, according to the instructions of the computer Drive the laser transmitter 5 to aim at the laser charging board 9 of the UAV in real time; the laser charging system includes the laser transmitter 5 and the laser charging board 9, which are used to emit and receive laser light, and transfer the laser energy to the UAV 8 and convert it into electrical energy store.
[0020] A visual tag 10 is added to the UAV. In order t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More