Method and system for lateral stability control of distributed drive electric vehicle
A stable control method and a stable control technology, applied in the direction of the control device, etc., can solve the problems that affect the accuracy of the model, cannot be applied, and the tire parameters deviate from the nominal value, etc., to achieve the effect of improving the yaw stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
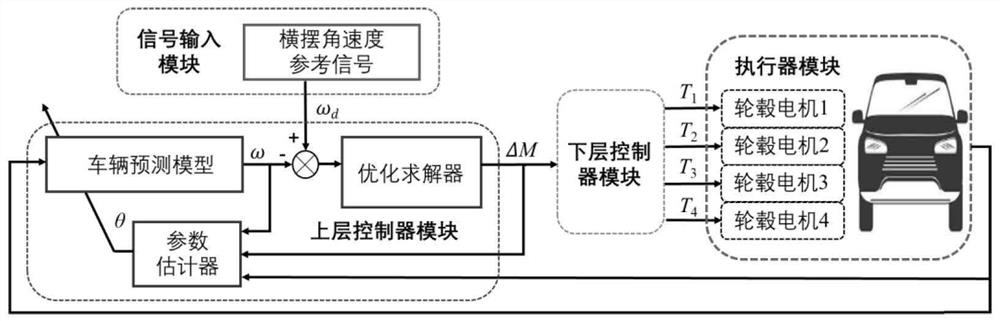
[0083] figure 1 It is a schematic diagram of the control structure in the embodiment of the present invention, such as figure 1 As shown, the control structure of the present invention includes four parts: a signal input module, an upper controller module, a lower controller module and an actuator module.
[0084] 1. The function of the signal input module is to input a signal to the upper controller: yaw rate reference signal.
[0085] 2. The upper controller module consists of three parts: vehicle prediction model part, optimization solver part and parameter estimator part. The function of this module is to solve the direct yaw moment, which is used to improve the yaw stability of the vehicle.
[0086] 3. The role of the lower controller module is to evenly distribute the direct yaw moment generated by the upper controller to the actuator.
[0087] 4. The actuator module is an actuator, including: 1. Hub motor, used to execute the torque distributed by the lower controlle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com