

Laser radar calibration method and device, storage medium and self-moving equipment
A technology of laser radar and calibration method, which is applied in the direction of radio wave measurement system, instrument, etc., can solve the problems of lack of accuracy and unfavorable data fusion processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
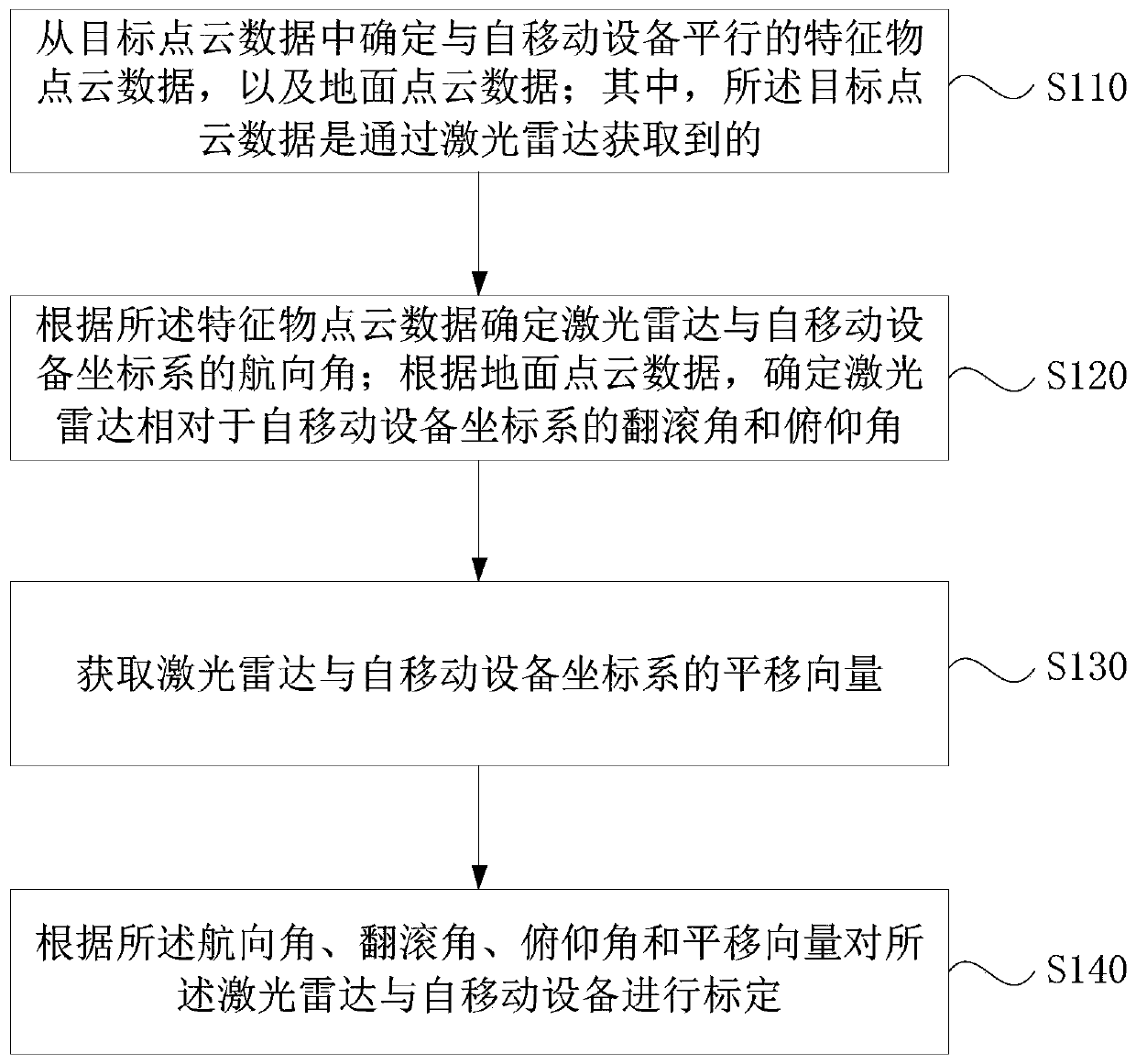
[0052] figure 1 It is a flow chart of the laser radar calibration method provided in Embodiment 1 of the present application. This embodiment is applicable to the case of calibrating the laser radar based on the coordinate system of the mobile device. This method can be implemented by the laser radar provided in the embodiment of the present application. The calibration device operates, and the device can be implemented by software and / or hardware, and can be integrated into electronic devices such as smart terminals.
[0053] Such as figure 1 As shown, the calibration method of the lidar includes:
[0054]S110. Determine feature point cloud data parallel to the self-mobile device and ground point cloud data from the target point cloud data; wherein, the target point cloud data is obtained through a laser radar.
[0055] Wherein, the self-mobile device may be a mobile device such as a vehicle or a robot. The target point cloud data can be one or more frames of point cloud d...
Embodiment 2
[0090] image 3 It is a schematic structural diagram of the lidar calibration device provided in Embodiment 2 of the present application. Such as image 3 As shown, the calibration device of the lidar includes:
[0091] The feature point cloud data determination module 310 is used to determine from the target point cloud data the feature point cloud data parallel to the self-mobile device, and the ground point cloud data; wherein, the target point cloud data is acquired by laser radar of;
[0092] The angle determination module 320 is used to determine the heading angle of the laser radar and the coordinate system of the mobile device according to the feature point cloud data; and determine the roll angle and pitch of the laser radar relative to the coordinate system of the mobile device according to the ground point cloud data horn;
[0093] A translation vector determination module 330, configured to obtain the translation vector of the lidar and the coordinate system of...
Embodiment 3
[0103] The embodiment of the present application also provides a storage medium containing computer-executable instructions, the computer-executable instructions are used to run a laser radar calibration method when executed by a computer processor, the method comprising:
[0104] Determining feature point cloud data and ground point cloud data parallel to the mobile device from the target point cloud data; wherein, the target point cloud data is obtained by laser radar;
[0105] Determine the heading angle of the laser radar and the coordinate system of the mobile device according to the feature point cloud data; and determine the roll angle and pitch angle of the laser radar relative to the coordinate system of the mobile device according to the ground point cloud data;
[0106] Obtain the translation vector of the lidar and the coordinate system of the mobile device;
[0107] The lidar and the mobile device are calibrated according to the heading angle, roll angle, pitch an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More