

Under-actuated dexterous hand with bifurcated palm and coaxial rotating wrist
A technology of coaxial rotation and underactuation, which is applied in the field of humanoid dexterous hands, can solve the problems that the end effector of the robot cannot adapt to the shape change of the object, and the clamping force on the surface of the object cannot be uniform, so as to achieve uniform force, save space, and control simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the drawings and specific embodiments, but the following embodiments do not limit the present invention in any way.
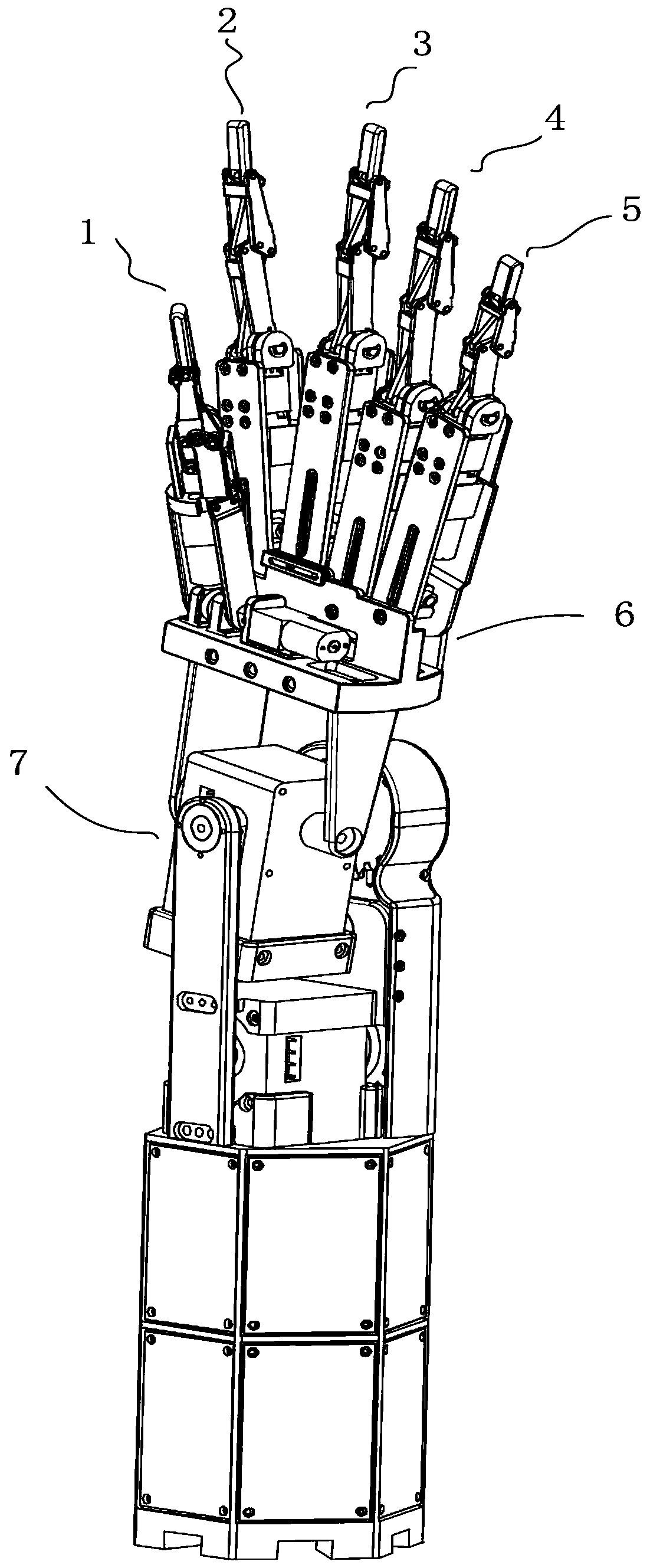
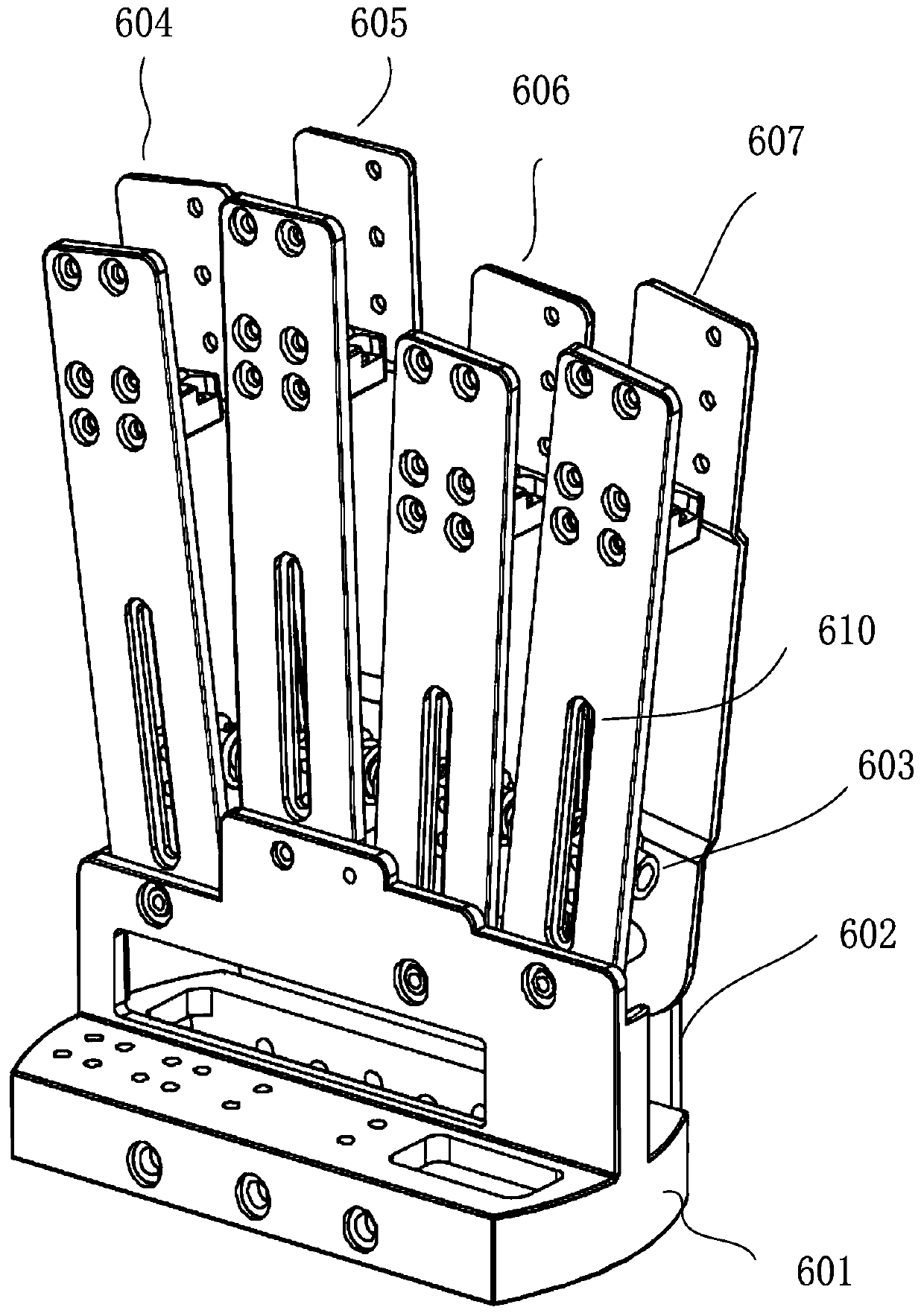
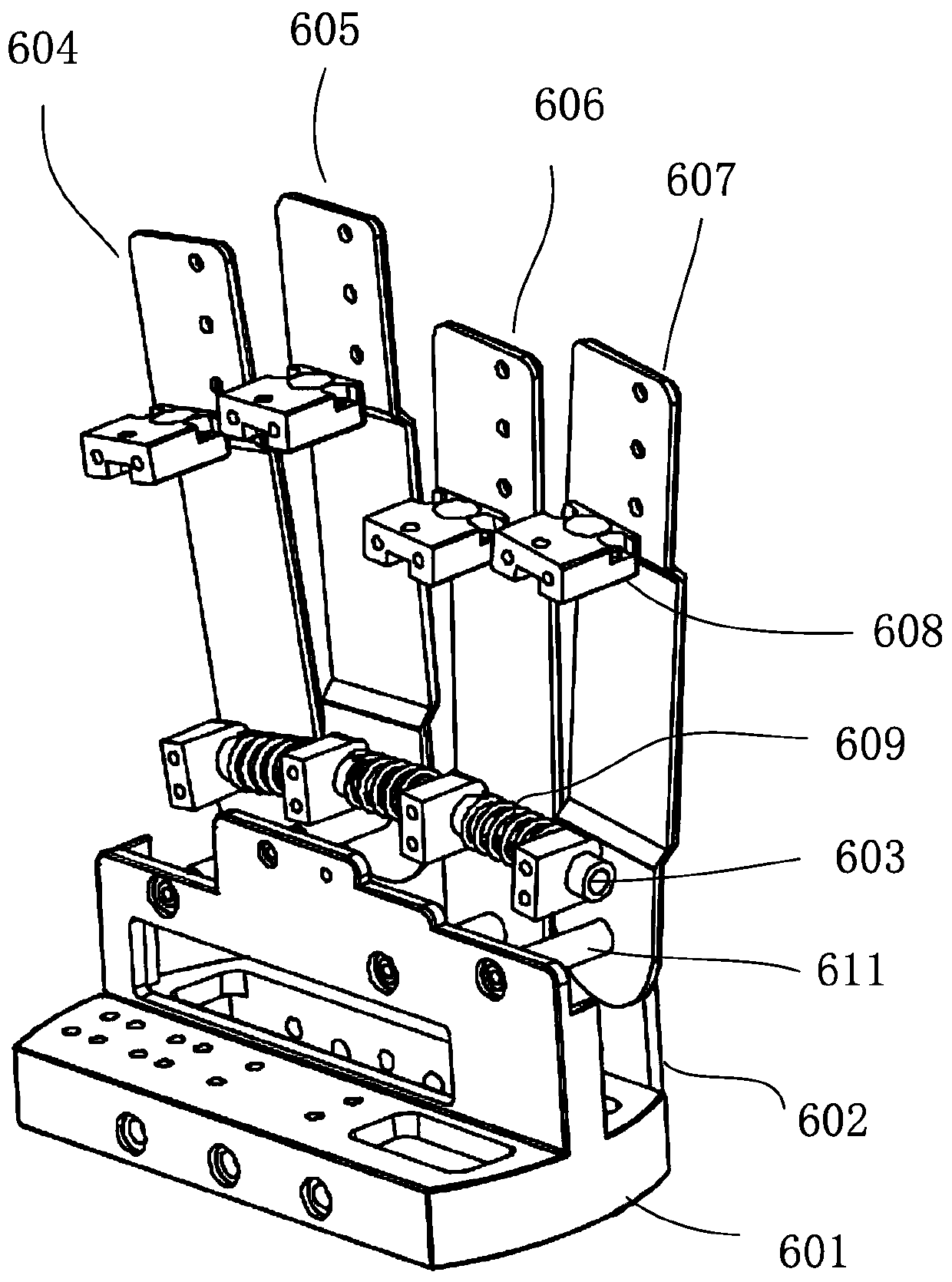
[0043] Such as figure 1 As shown, the present invention proposes an under-actuated dexterous hand with a bifurcated palm and a coaxially rotating wrist, which includes a bifurcated palm base 6 base connected to a coaxially rotating wrist base 7 via a steering wheel. The bifurcated palm base 6 The base includes a palm base base 601 base, and five fingers are connected to the palm base base 601. The five fingers include a thumb base 1 base, an index finger base 2 base, and a middle finger base 3 base. , Ring finger base 4 base and little finger base 5 base; including the index finger base 2 base, middle finger base 3 base, ring finger base 4 base and little finger base 5 base, the four fingers are connected to the separable base through the palm base shaft base 611 base On the base of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More