Robot path navigation method and system based on deep reinforcement learning
A technology of reinforcement learning and path navigation, applied in navigation calculation tools, general control systems, control/regulation systems, etc., can solve problems such as poor flexibility, inapplicability to dynamic and unknown environments, and large limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
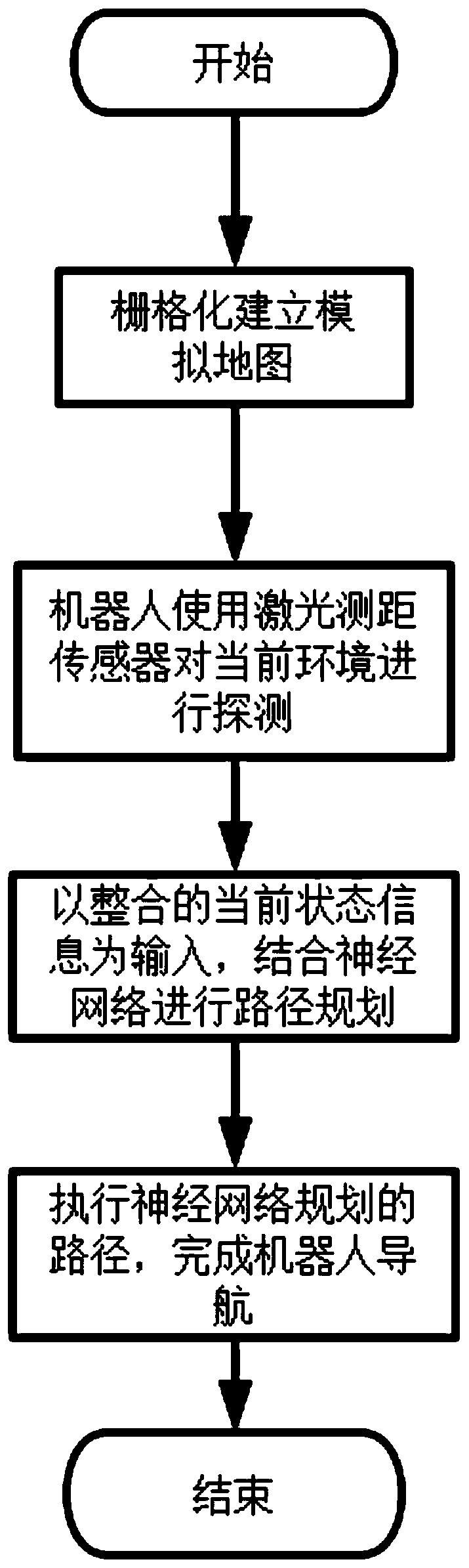
[0028] Such as figure 1 As shown, this embodiment provides a robot path navigation method based on deep reinforcement learning, including:
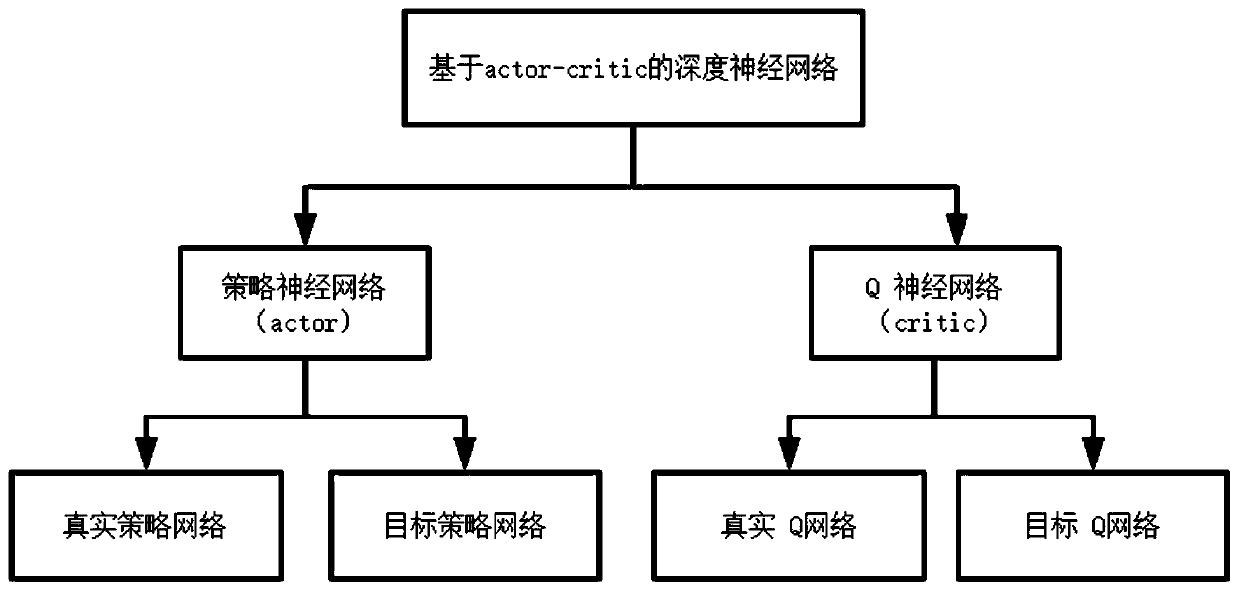
[0029] S1: Construct a dual Actor-Critic neural network based on deep reinforcement learning, and use the first Actor-Critic neural network to output the robot's initial movement action and the evaluation value of the initial movement action according to the acquired robot's current motion state;
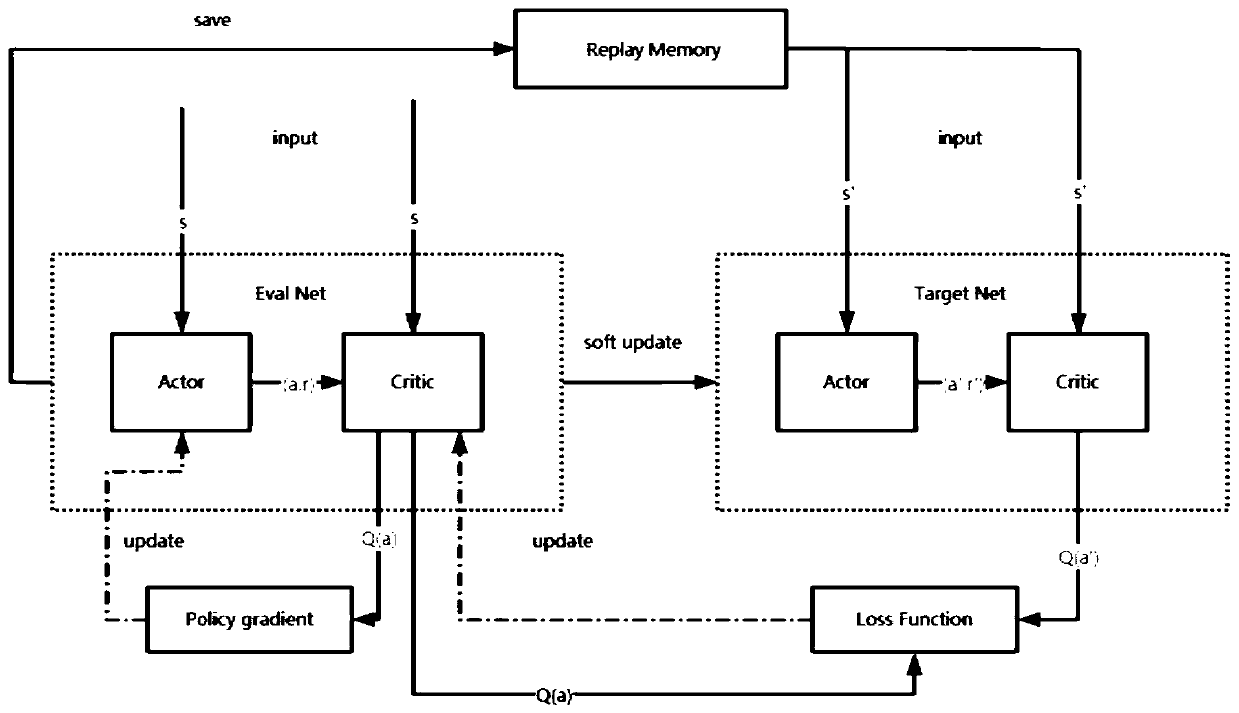
[0030] S2: Use the current motion state of the robot and the evaluation value of the initial movement action as the training set to train the second Actor-Critic neural network, and update the first Actor-Critic neural network according to the trained second Actor-Critic neural network, The updated first Actor-Critic neural network is used to output the optimal movement action according to the current motion state of the robot, so as to navigate the optimal path of the robot.
[0031] In this embodiment, the real environment is simulated, and ...
Embodiment 2
[0073] This embodiment provides a robot path navigation system based on deep reinforcement learning, including:
[0074] The initial path navigation module is used to construct a dual Actor-Critic neural network based on deep reinforcement learning, and uses the first Actor-Critic neural network to output the initial movement action of the robot and the evaluation value of the initial movement action according to the acquired current motion state of the robot;
[0075] The path navigation update module is used to train the second Actor-Critic neural network with the current motion state of the robot and the evaluation value of the initial movement action as a training set, and to train the first Actor-Critic neural network according to the trained second Actor-Critic neural network. The neural network is updated, and the updated first Actor-Critic neural network outputs an optimal movement action according to the current motion state of the robot, so as to navigate the optimal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com