

Intelligent handling robotic arm system based on 3D vision and deep learning, and using method
A deep learning and intelligent handling technology, applied in neural learning methods, manipulators, program-controlled manipulators, etc., to achieve the effect of unmanned work, automation, and enhanced applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with illustrations and specific embodiments.
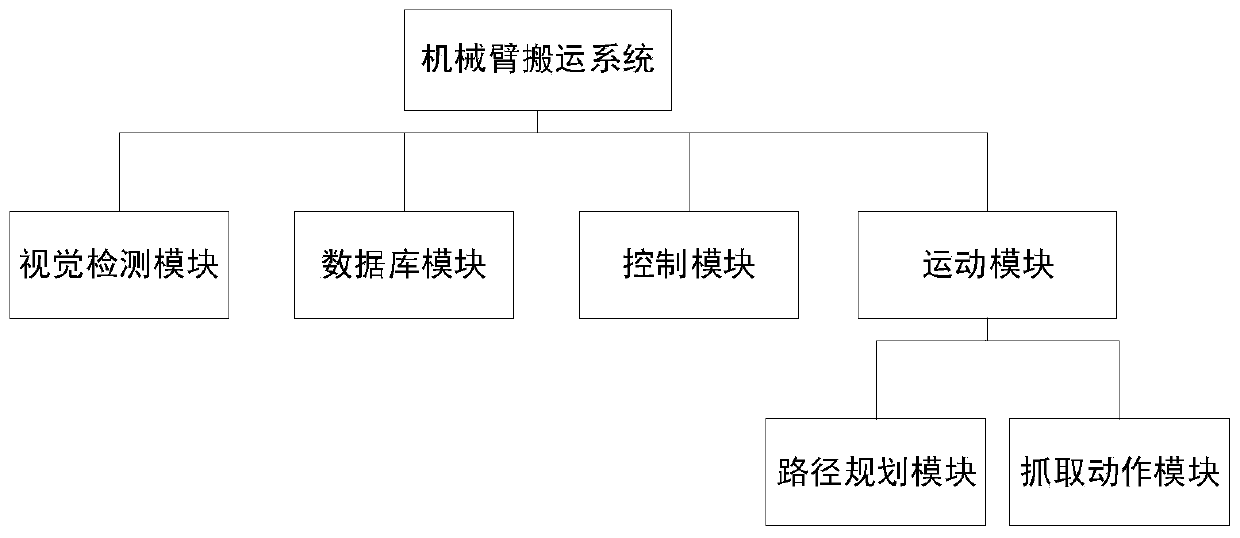
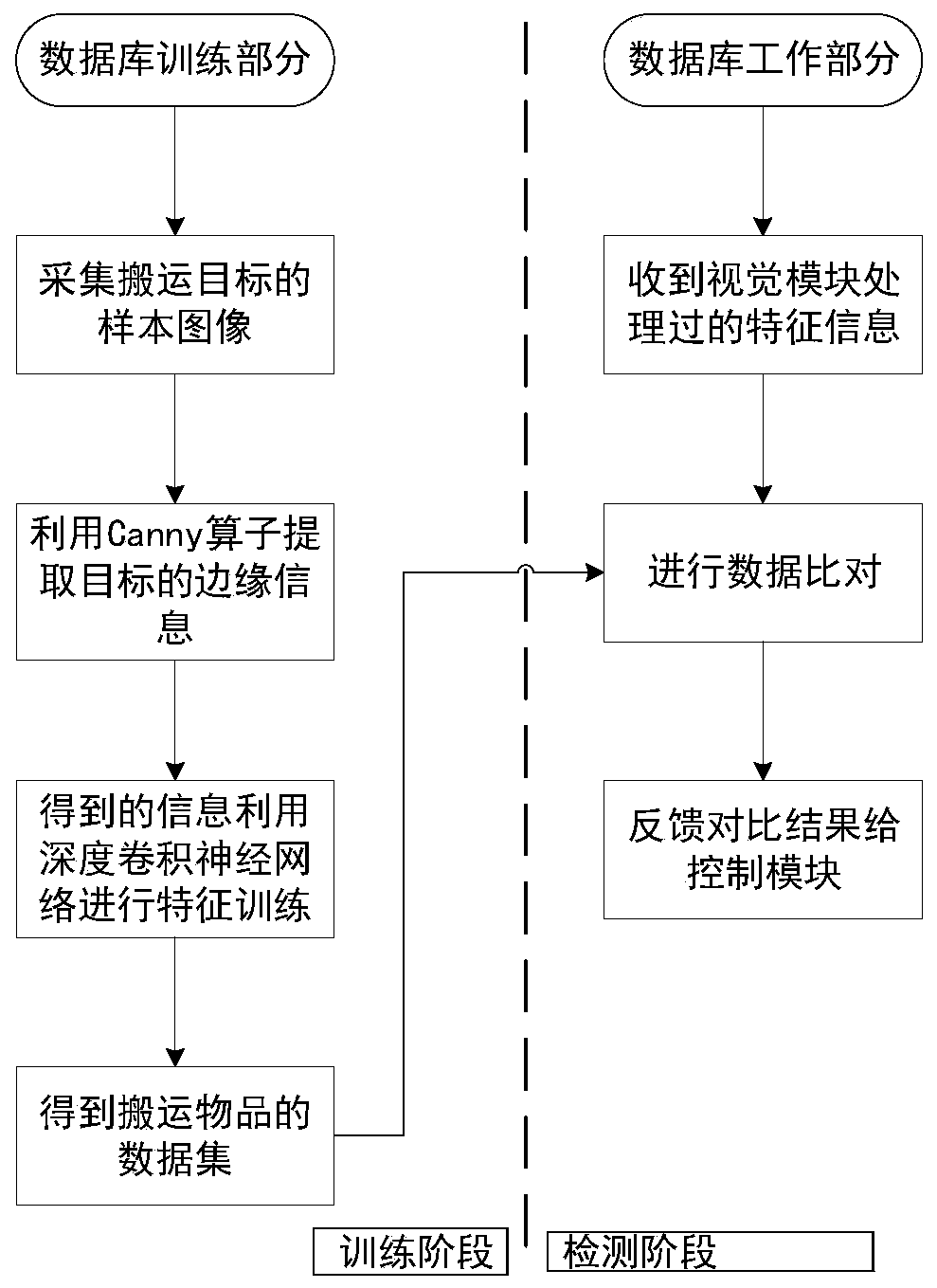
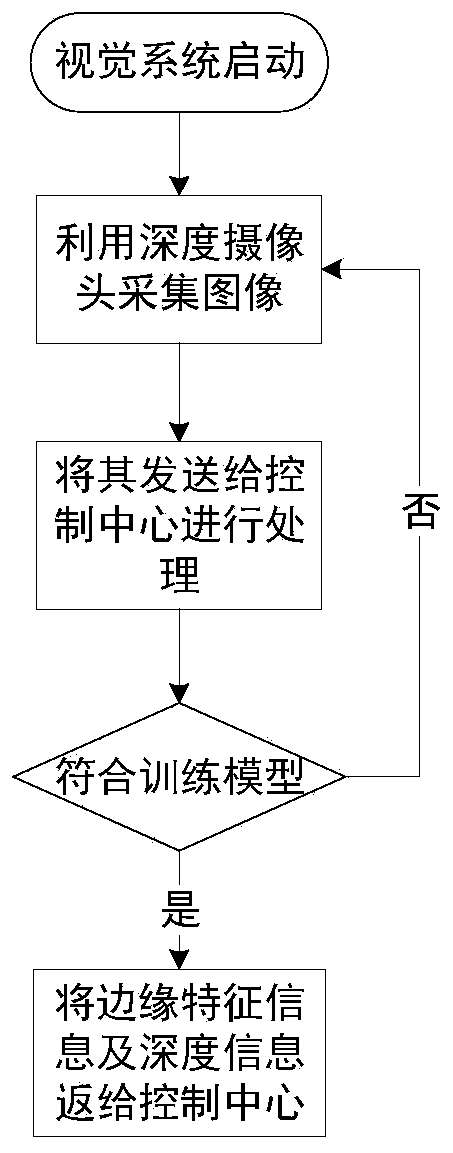
[0038] Such as Figure 1 to Figure 6As shown, the intelligent handling manipulator system based on 3D vision and deep learning proposed by the present invention includes a visual detection module, a training and learning module, a motion planning module and a control module. The visual detection module collects images of objects and sends them to the control module; The visual detection module has a binocular depth camera and an RGB camera, and uses the binocular depth camera to collect images of objects, uses the RGB camera to collect visible light images, uses the binocular depth camera to collect depth information of objects, and sends them to the control module as required ; The training and learning module collects sample d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More