Method and system for positioning mark center with weak contrast
A positioning mark and contrast technology, which is applied in image data processing, instrumentation, calculation, etc., can solve the problems of weak contrast positioning mark center, limitation and low precision, and achieves the effects of reliable results, good stability and fast speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
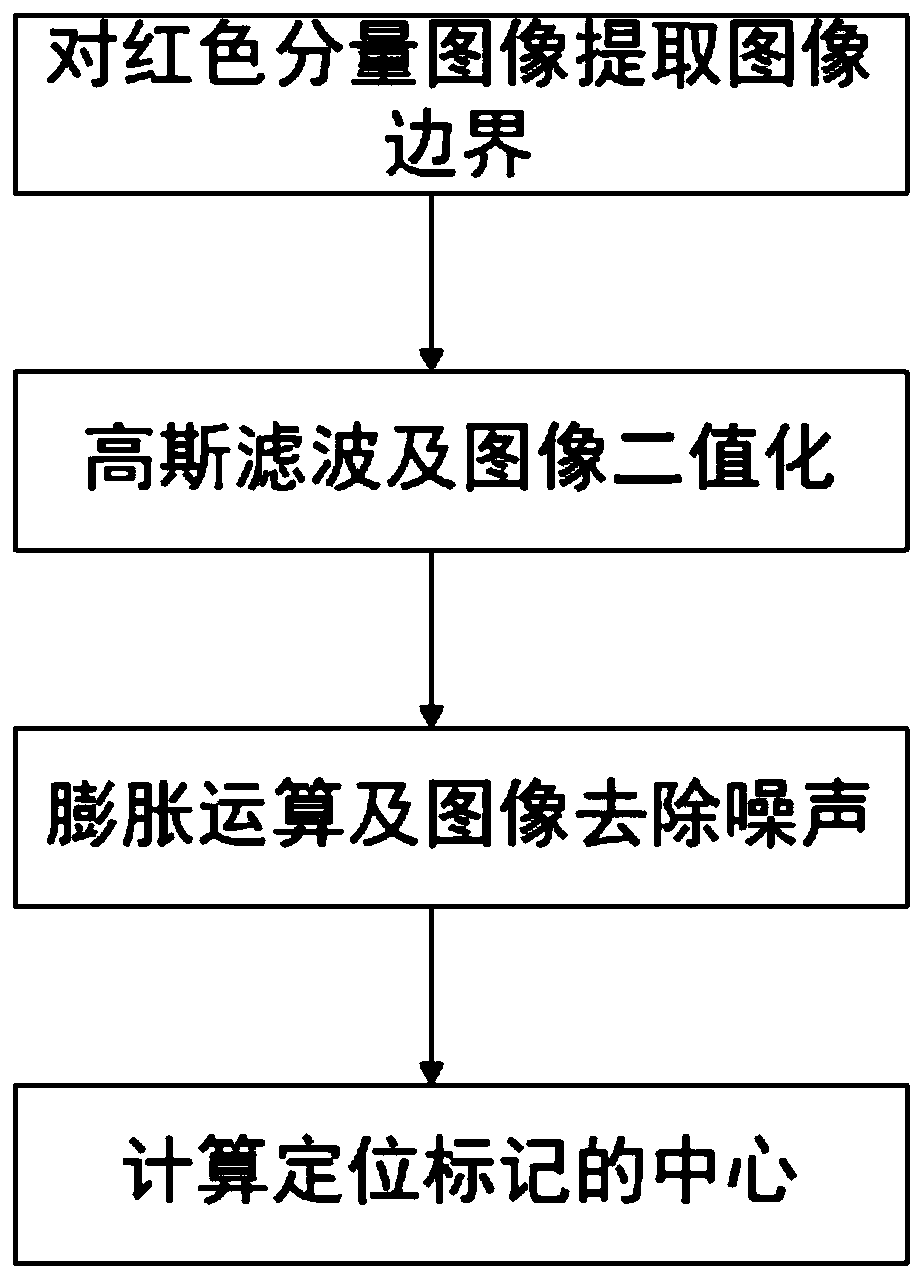
[0039] Such as figure 1 As shown, the object of the present invention is to obtain the center of a weak contrast localization mark. The calculation process is as follows:
[0040] 1. Use the red component image of the positioning marker image to extract the image (such as figure 2 shown in the image) with boundaries such as image 3 :
[0041] A) Obtain the red component of the image, and calculate it according to the RGB component ratio of the image. The RGB component ratios are: 0.299, 0.587, and 0.114.
[0042] B) Extract the edge of the positioning mark image using a 3X3 Sobel filter, and the horizontal and vertical filters are as follows:
[0043]
[0044] 2. Gaussian filtering and image binarization such as Figure 4 :
[0045] A) Gaussian filtering uses a 3X3 kernel, and the filter is as follows:
[0046]
[0047] B) Calculate the threshold for image binarization. First calculate the grayscale histogram of the image, and filter the high-frequency signal a...
Embodiment 2
[0056] This embodiment provides a system for positioning the center of the mark with weak contrast, such as Figure 7 shown, including:
[0057] Extract image boundary module 100, for the red component image that extracts seeks the boundary of positioning marker image;
[0058] An image binarization module 200, configured to binarize the image after Gaussian noise removal;
[0059] The image denoising module 300 is used to remove sparse discrete points and retain useful information on the edge of the positioning marker image;
[0060] The module 400 for calculating the center of the positioning mark image is used for calculating the horizontal and vertical coordinates of the center of the positioning mark image.
[0061] The beneficial effect of this embodiment is that the boundary extraction of the positioning mark image is realized by extracting the red component image, binarized after Gaussian filtering, the image expansion operation removes noise points again, and finall...
Embodiment 3
[0063] This embodiment provides an electronic device, including a memory, a processor, and a computer program stored in the memory and operable on the memory, and the processor executes the program to implement the computer program described in Embodiment 1. The weak contrast method described above locates the center of the marker.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More