

Vehicle real-time positioning method and system and vehicle
A real-time positioning and vehicle technology, used in satellite radio beacon positioning systems, radio wave measurement systems, and re-radiation, etc., can solve problems such as poor satellite positioning accuracy and accumulated errors, and achieve the effect of improving positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
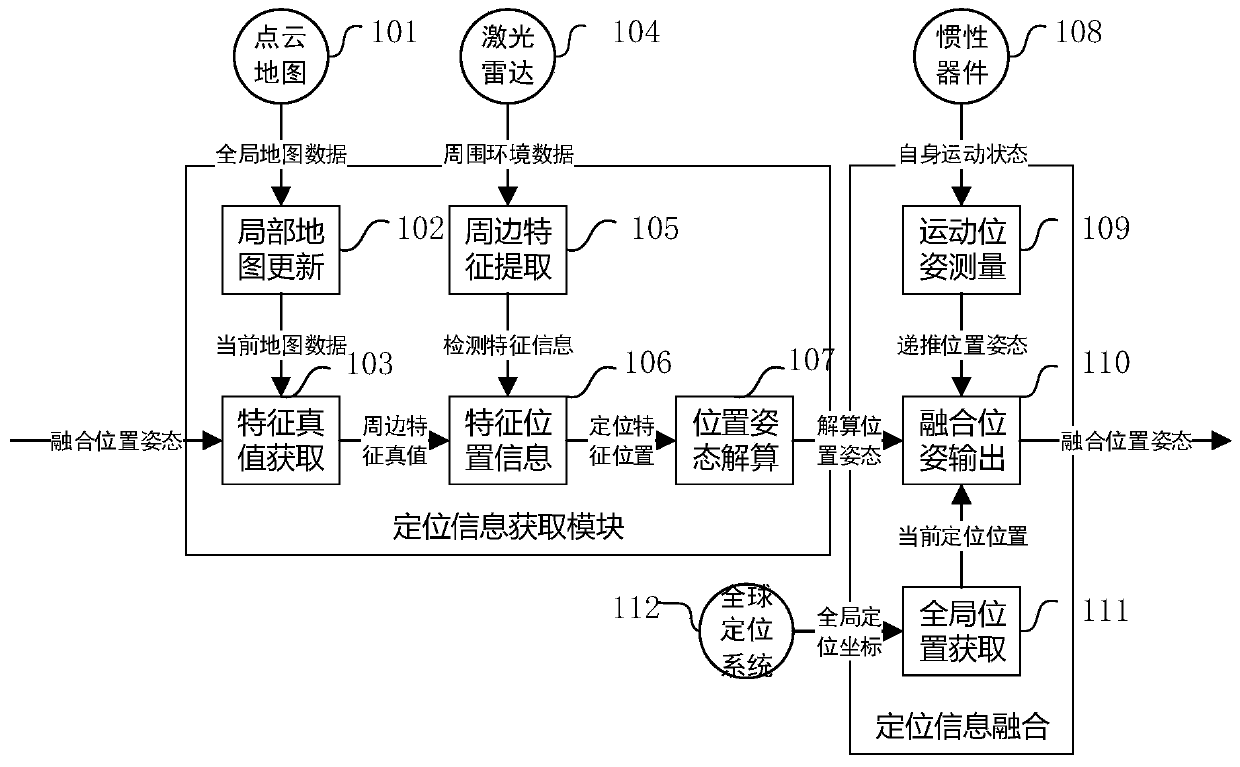
[0043] Such as figure 1 As shown, point cloud map 101, global map data, local map update, current map data, feature true value acquisition 103,
[0044] Lidar 104, surrounding feature extraction 105, feature position information 106, position and attitude calculation 107, inertial device 108, motion pose measurement 109, fusion pose output 110, GPS receiver 112, global position acquisition 111.
[0045] A point cloud map 101 is set in the ADAS system, global map data is obtained in advance from the point cloud map 101 , and a local map update 102 can be obtained from the point cloud map 101 . Convert the latitude and longitude of the global map data into position information, thereby obtain the local map update 102, and intercept a sufficiently large range as the current map data. From the global map data, the surrounding feature true 103 is obtained. Construct the surrounding feature truth-value dictionary, in which the feature attribute is used as the key and the feature p...
Embodiment 2
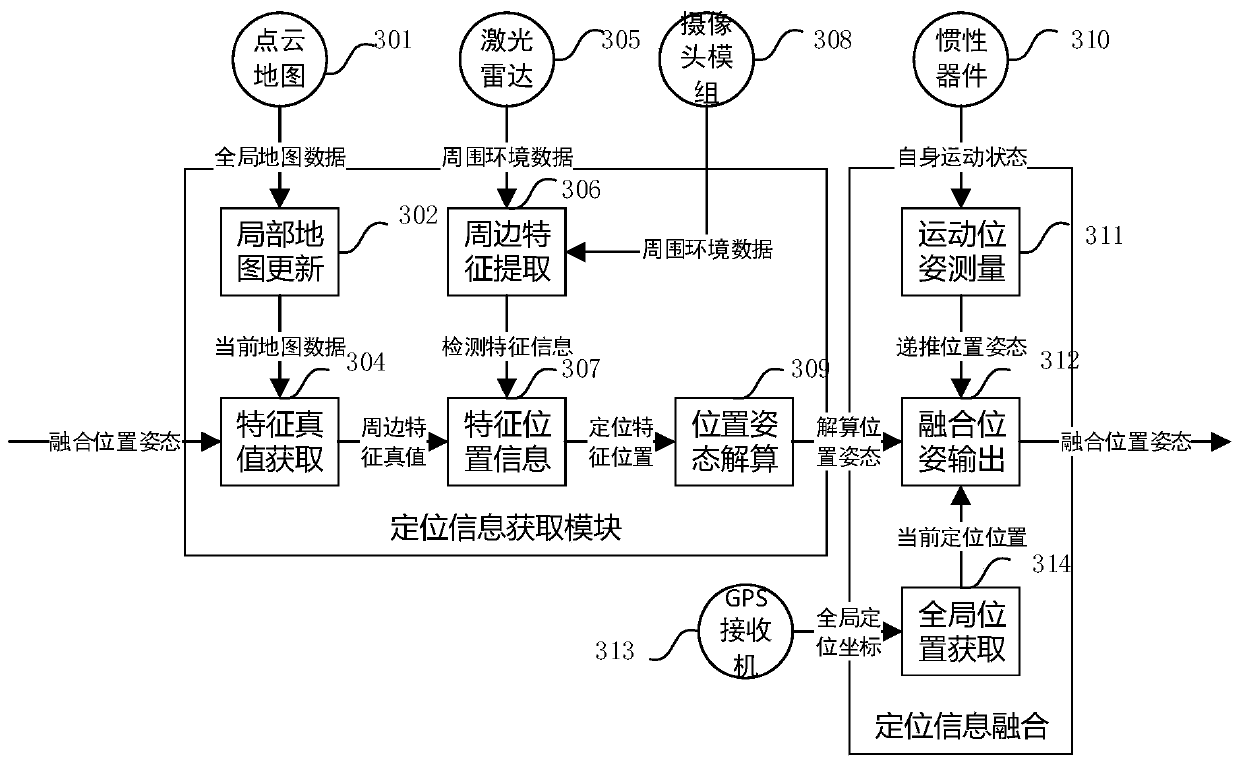
[0059] Such as Figure three as shown in figure 1 As shown, point cloud map 301, global map data, local map update, current map data, feature true value acquisition 304,
[0060] Lidar 305, surrounding environment data, surrounding feature extraction 306, detection feature information, feature position information 307, positioning feature position, position and attitude calculation 309, position and attitude calculation, inertial device 310, motion pose measurement 311, fusion pose Output 312, GPS receiver 313, global position acquisition 314, fusion position and attitude.
[0061] A point cloud map 301 is set in the ADAS system, global map data is obtained in advance from the point cloud map 301 , and a local map update 302 can be obtained from the point cloud map 301 . The latitude and longitude of the global map data is converted into position information, so as to obtain the local map update 302, and a sufficiently large range is intercepted as the current map data. Obt...
Embodiment 3
[0077] Such as Figure 4 Shown is point cloud map 401 , global map data, local map update, current map data, feature truth value acquisition 103 .
[0078] Lidar 403, surrounding environment data, surrounding feature extraction 404, detection feature information, feature position information 405, positioning feature position, position and attitude calculation 406, position and attitude calculation, inertial device 407, motion pose measurement 408, fusion pose Output 409.
[0079] A point cloud map 401 is set in the ADAS system, which is obtained in advance from the point cloud map 401 , and a local map update 102 can be obtained from the point cloud map 401 . Convert the latitude and longitude of the global map data into position information, thereby obtain the local map update 102, and intercept a sufficiently large range as the current map data. From the global map data, the surrounding feature ground truth 103 is obtained. Construct the surrounding feature truth-value di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More