

Multi-terminal cooperative forest crown geomorphic mapping system and method
A kind of multi-terminal and forest technology, applied in radio wave measurement system, satellite radio beacon positioning system, electromagnetic wave re-radiation and other directions, can solve the problem of low positioning accuracy, reduce accuracy, improve positioning accuracy, and ensure consistency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
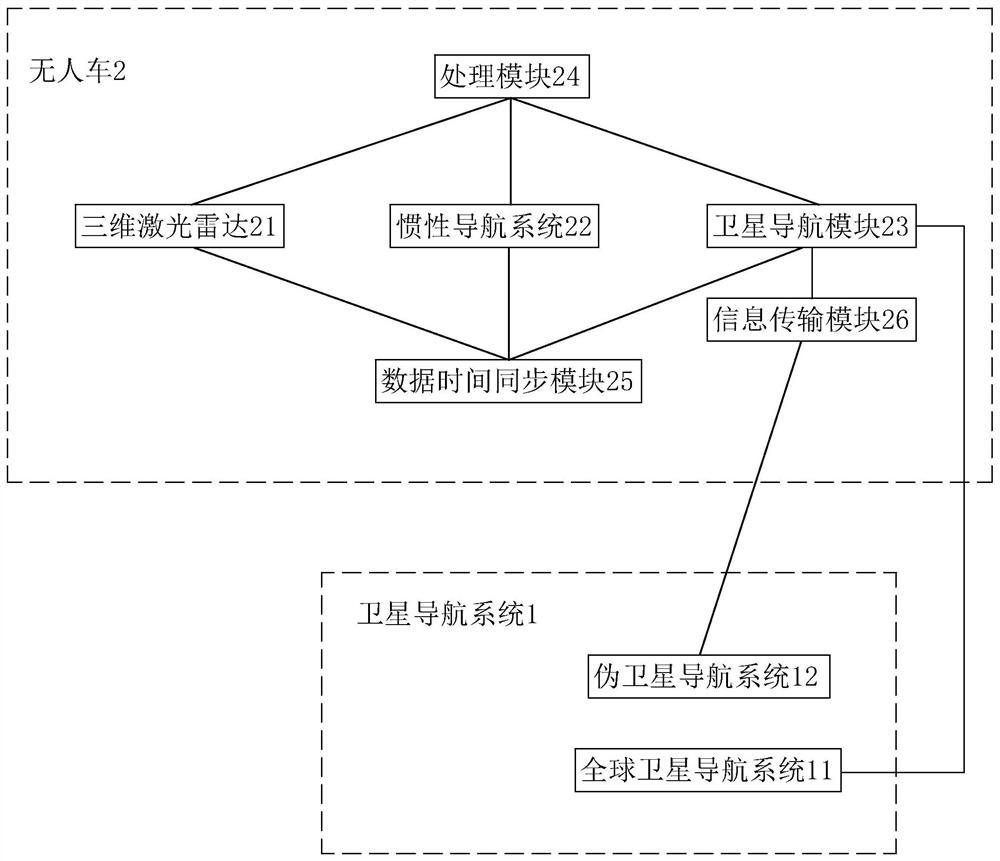
[0044] Embodiment: a kind of multi-terminal cooperative forest topography mapping system under the canopy of this embodiment, such as figure 1 As shown, it includes a satellite navigation system 1 and an unmanned vehicle 2. Wherein the satellite navigation system includes a global satellite navigation system 11 and a pseudolite navigation system 12 .
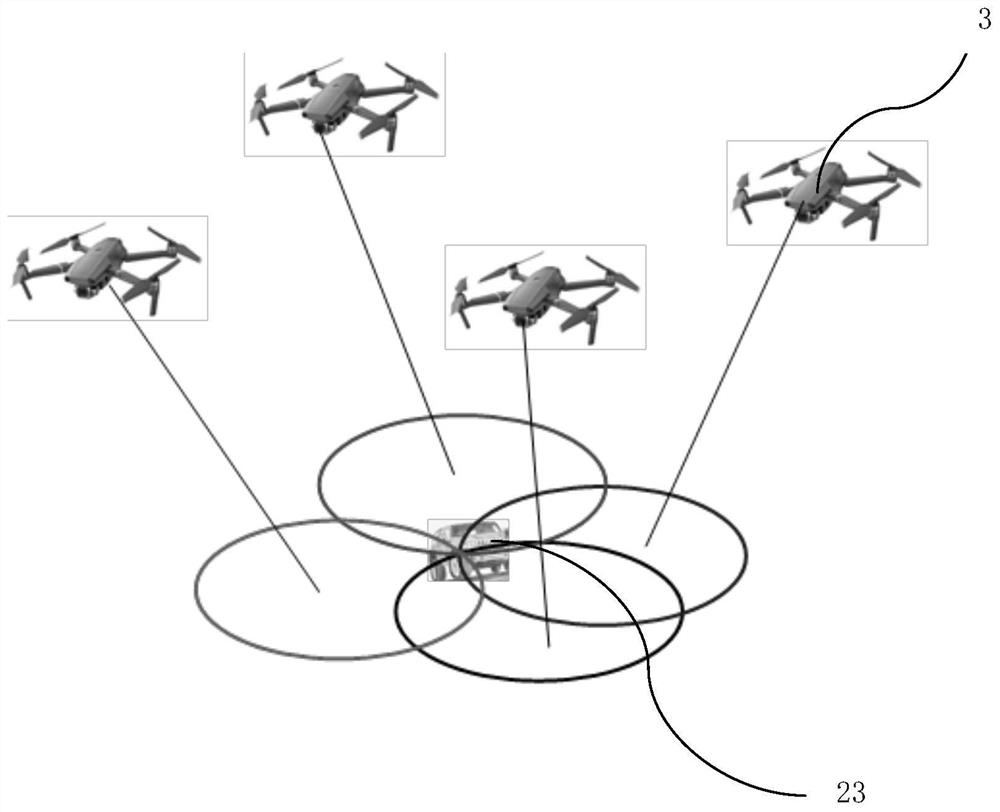
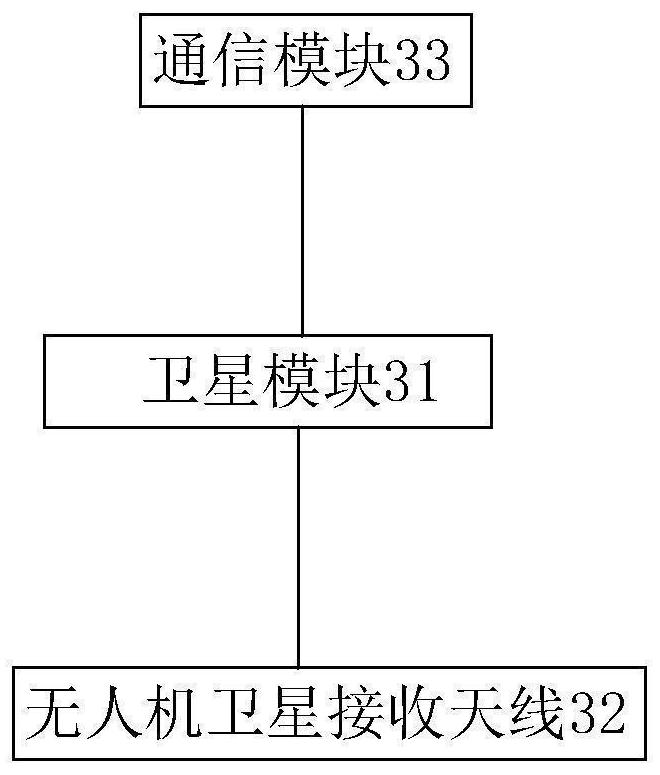
[0045] pseudolite navigation system figure 2 As shown, it consists of a UAV group and an unmanned vehicle, and the UAV group includes four UAVs3. Drones such as image 3 As shown, it includes a satellite module 31, a UAV satellite receiving antenna 32 and a communication module 33, the satellite receiving antenna is connected to the satellite module, and the communication module is connected to the satellite module.
[0046] The unmanned vehicle includes three-dimensional laser radar 21, inertial navigation system 22, satellite navigation module 23, processing module 24, data time synchronization module 25 and information tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More