

Ship bottom marine fouling organism cleaning robot
A technology for cleaning robots and marine fouling. It is used in ship cleaning devices, hulls, and manipulators. It can solve the problems of uncontrollable air bubbles, high labor intensity, and aggravated ship bottom corrosion, and achieve the effect of improving stability and preventing the body from falling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing.
[0027] In the description of the present invention, unless otherwise specified and limited, it should be noted that the term "connection" should be understood in a broad sense, for example, it can be a mechanical connection or an electrical connection, or it can be the internal communication of two elements, it can be Directly connected or indirectly connected through an intermediary, those skilled in the art can understand the specific meanings of the above terms according to specific situations.
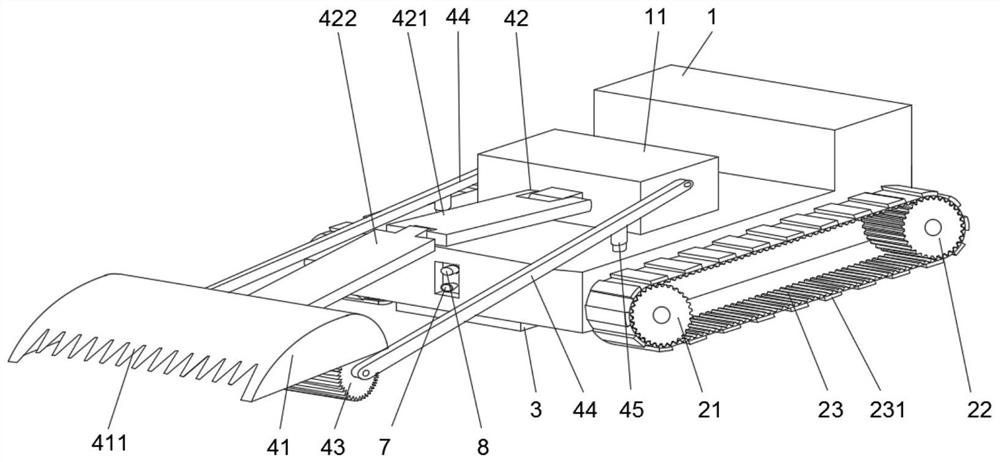
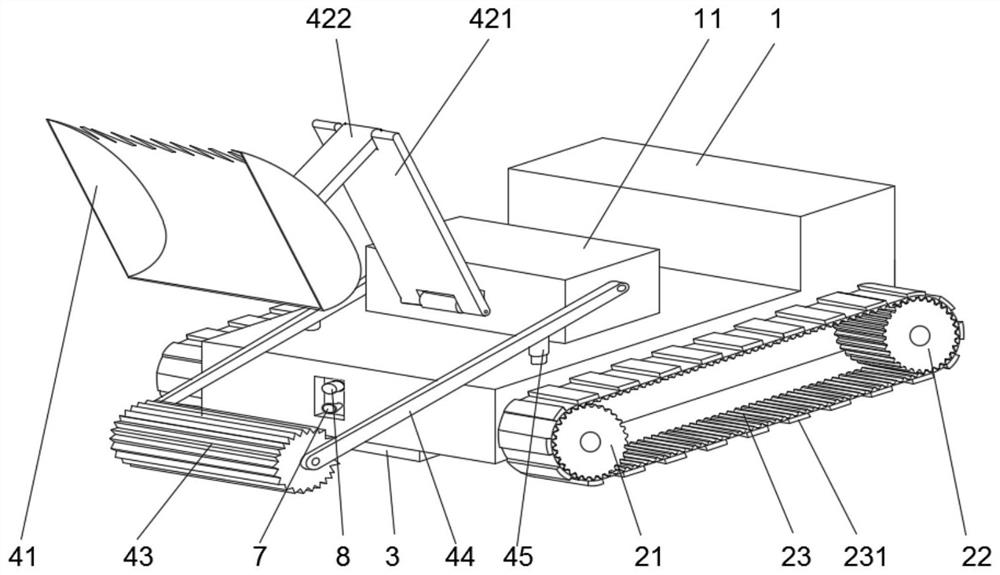
[0028] Such as Figure 1-4 As shown, the present invention includes a body 1, a running device 2, an adsorption device 3, a cleaning device 4, a driving device 5 and a control device 6, and the running device 2 is installed on both sides of the body 1 for driving the body 1 to advance and turn The adsorption device 3 is arranged on the bottom of the body 1, and is used to adsor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More