

Wall-climbing robot suitable for cleaning fan tower
A technology for wall-climbing robots and fan towers, applied in the field of wall-climbing robots, can solve problems such as self-heavy weight and low load force, and achieve the effects of reducing configuration and self-weight, avoiding use, and improving load capacity and working characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
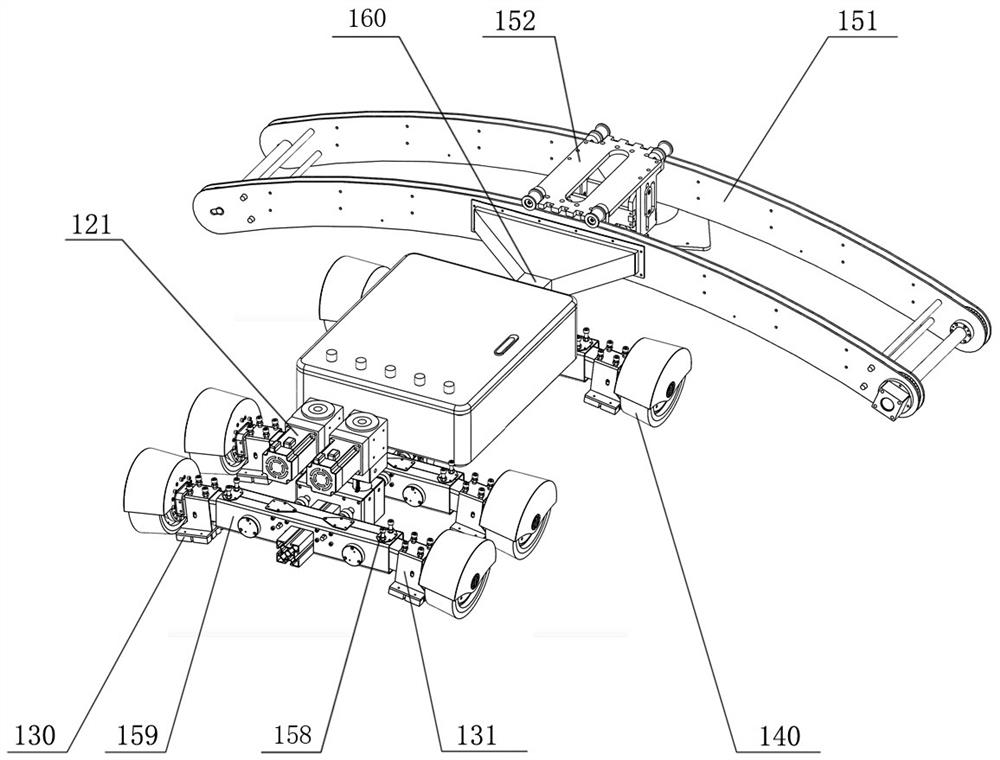
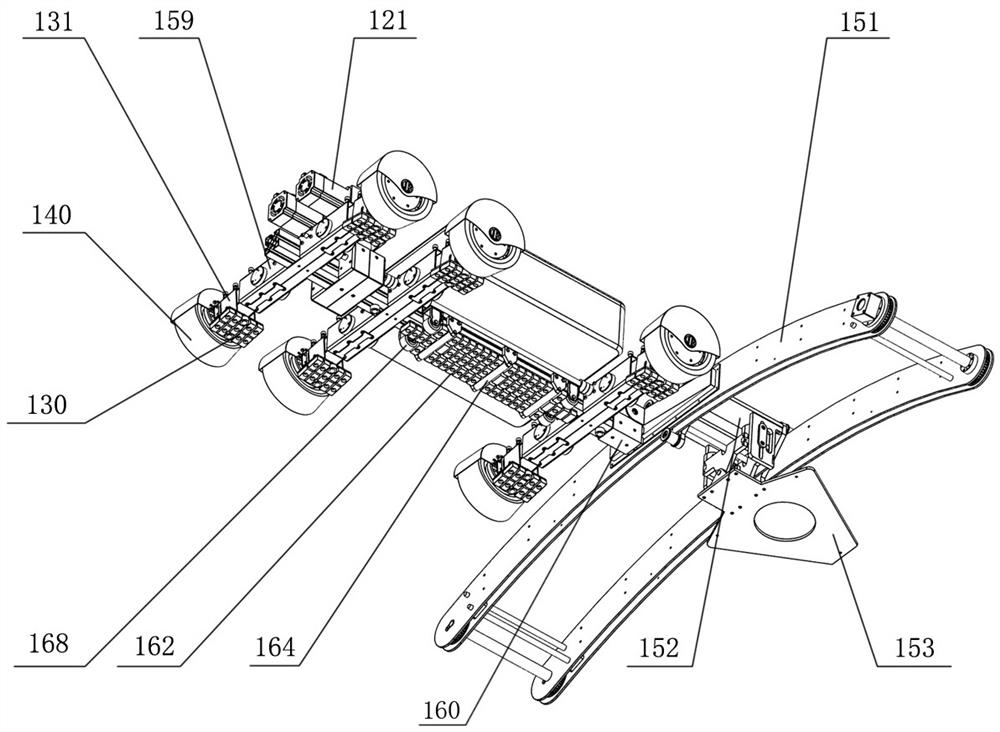
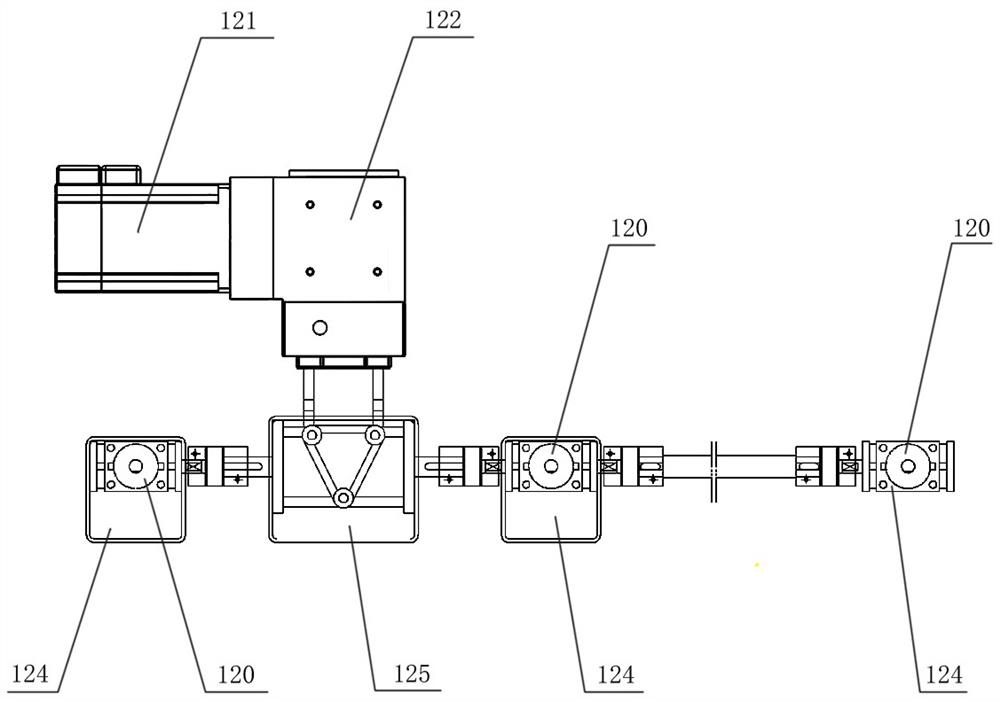
[0038] Such as figure 1 , figure 2 As shown, the wall-climbing robot of the present invention includes a frame 160, a walking drive system, a movable support arm, a magnetic chuck 162 and the like. The front portion of the frame 160 is provided with an arc-shaped double-arm guide rail 151, on the arc-shaped double-arm guide rail 151, a slide mechanism 152 that can reciprocate on the guide rail is installed, and on the slide mechanism 152, a mounting plate for installing a cleaning device is provided 153. Front, middle and rear three horizontal sleeves 159 are installed on the frame 160, and a movable support arm is connected inside each port of the three horizontal sleeves 159, and the outer end of each movable support arm is connected with the wheel assembly 140, Thus, a structure of three movable arms on each side is formed. A magnetic chuck 162 is mounted on the bottom surface of the frame 160 . The magnetic chuck 162 is a magnetic chuck composed of several strong magn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More