

Intelligent robot grabbing method based on action demonstration teaching
A kind of intelligent robot and robot technology, applied in the field of robot learning, can solve problems that affect algorithm performance, difficult to transfer, rely on human experience, etc., and achieve the effect of strong adaptability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
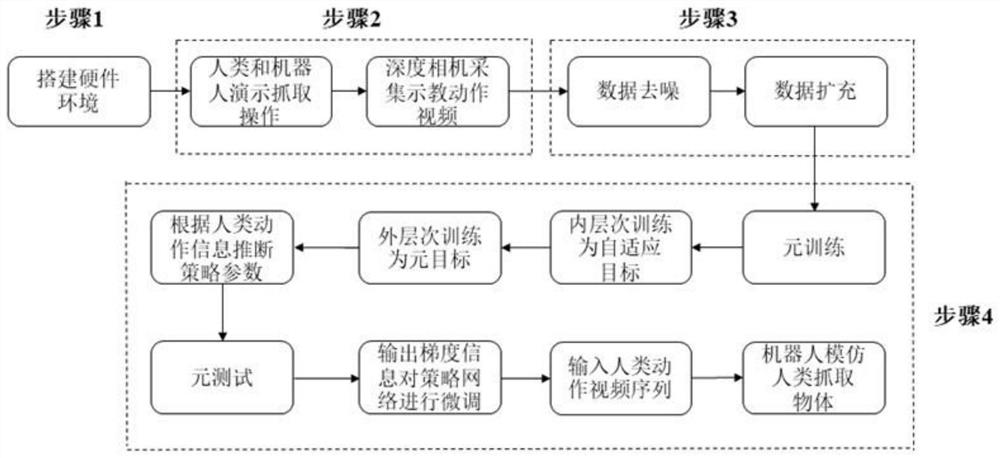
[0068] figure 1 A schematic flow chart of the intelligent robot grasping method based on action demonstration and teaching of the present invention is given, as shown in figure 1 As shown, the present invention provides a kind of intelligent robot grasping method based on action demonstration teaching, comprising the following steps:
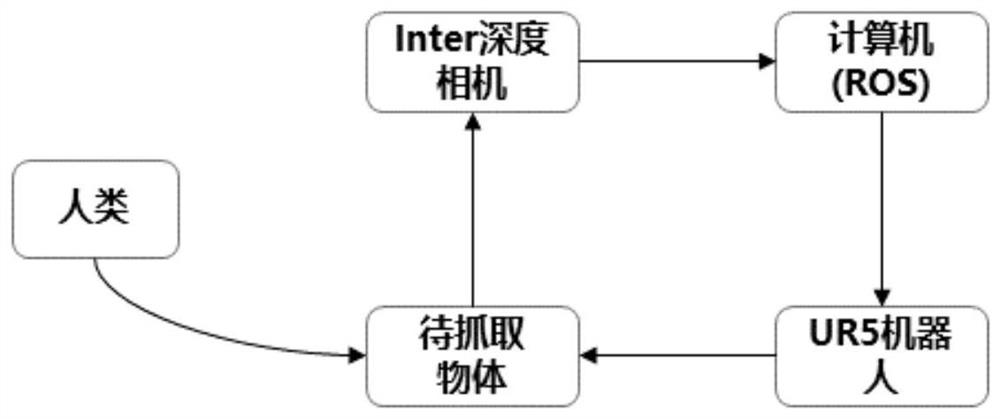
[0069] Step S1: Complete the hardware environment construction of the action demonstration teaching programming system;
[0070] Step S2: The human demonstrates the grasping operation to form a human teaching action video, and the human uses the teaching pendant to control the robot to complete the demonstration grasping action to form a robot teaching action video;
[0071] Step S3: Denoise and expand the data sets of both the human teaching action video and the robot teaching action video;
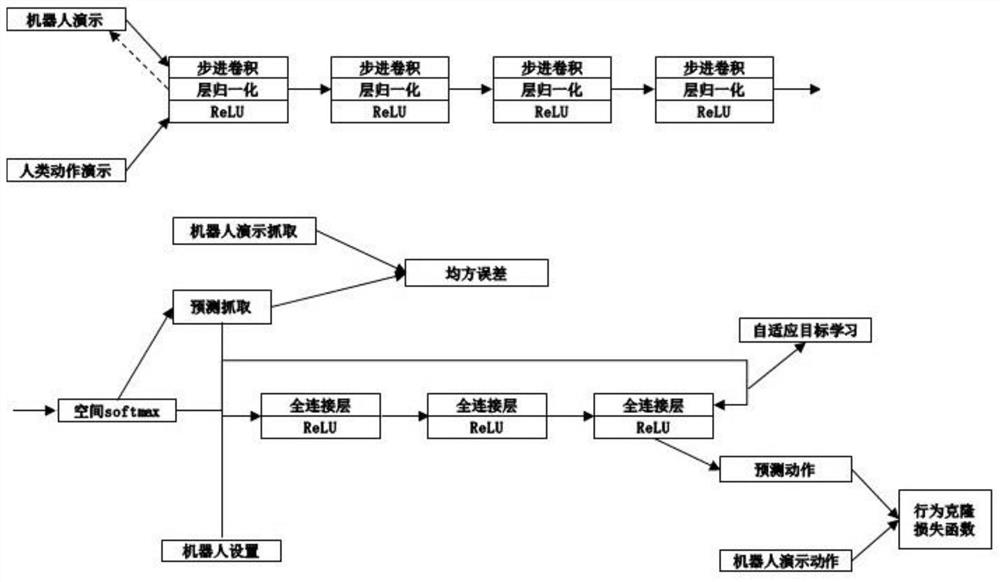
[0072] Step S4: Use the meta-learning algorithm to automatically learn prior knowledge directly from the teaching actions of humans and robots to realiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More