

A gantry type anchor digging robot system
A robot system and robot technology, applied in the direction of cutting machinery, slitting machinery, installation of bolts, etc., can solve problems such as time-consuming, cumbersome operation procedures, and reduction of safety passage area, so as to ensure strength and stability, and ensure The effect of supporting efficiency and shortening the empty roof distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several modifications and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
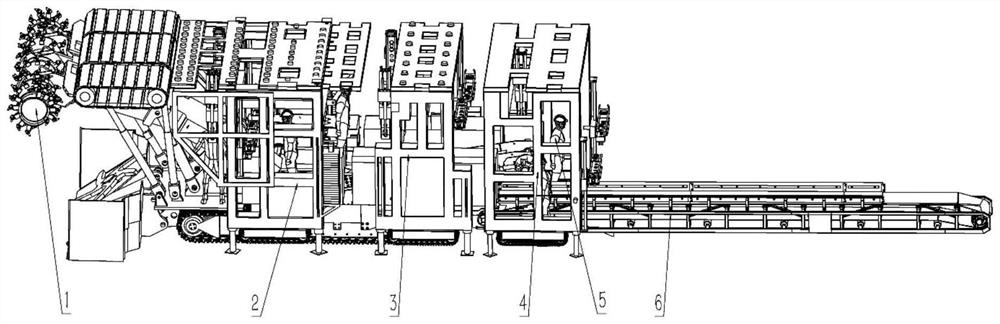
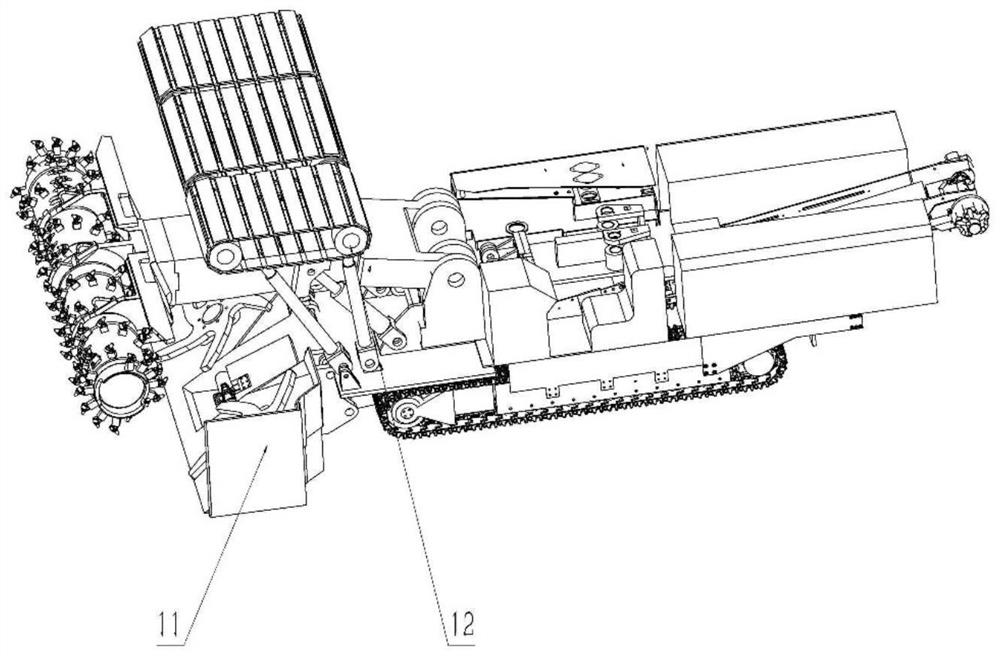
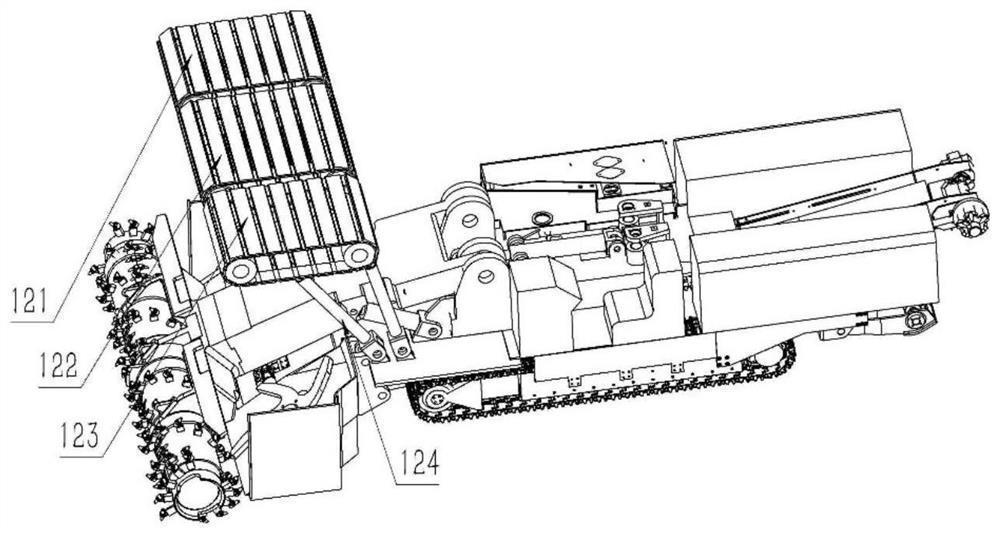
[0030] like Figure 1-Figure 2 As shown, a gantry-type anchor-digging and protecting robot system includes a cutting robot 1, a temporary support mechanism 12, an anchor-drilling robot I2, an anchor-drilling robot II3, an anchor-drilling robot III4 and a transport device 5; the cutting robot 1, the temporary support The protection mechanism 12 is located at the front of the system, the anchor drilling robot I2, the anchor drilling robot II3, the anchor drilling robot III4, the staff 5 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More