

Kinematic stability evaluation method of a rigid-flexible lower limb gait rehabilitation training robot
A technology of motion stability and rehabilitation training, applied in the direction of manipulators, mechanical equipment, combustion engines, etc., can solve the problems that are not comprehensive enough, without considering the influence of the cable tension on the motion stability of the end effector, and without considering the motion stability of the cable tension Sexual impact and other issues to achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0035] The purpose of the present invention is to solve the above problems, providing a rigid-flexible hybrid lower limb gait rehabilitation training robot motion stability evaluation method, filling the current rigid-flexible hybrid drive traction parallel robot stability evaluation index and single consideration factors in the evaluation method, etc. Insufficient, to lay a research foundation for improving the stability of the rigid-flexible lower limb gait rehabilitation training robot.
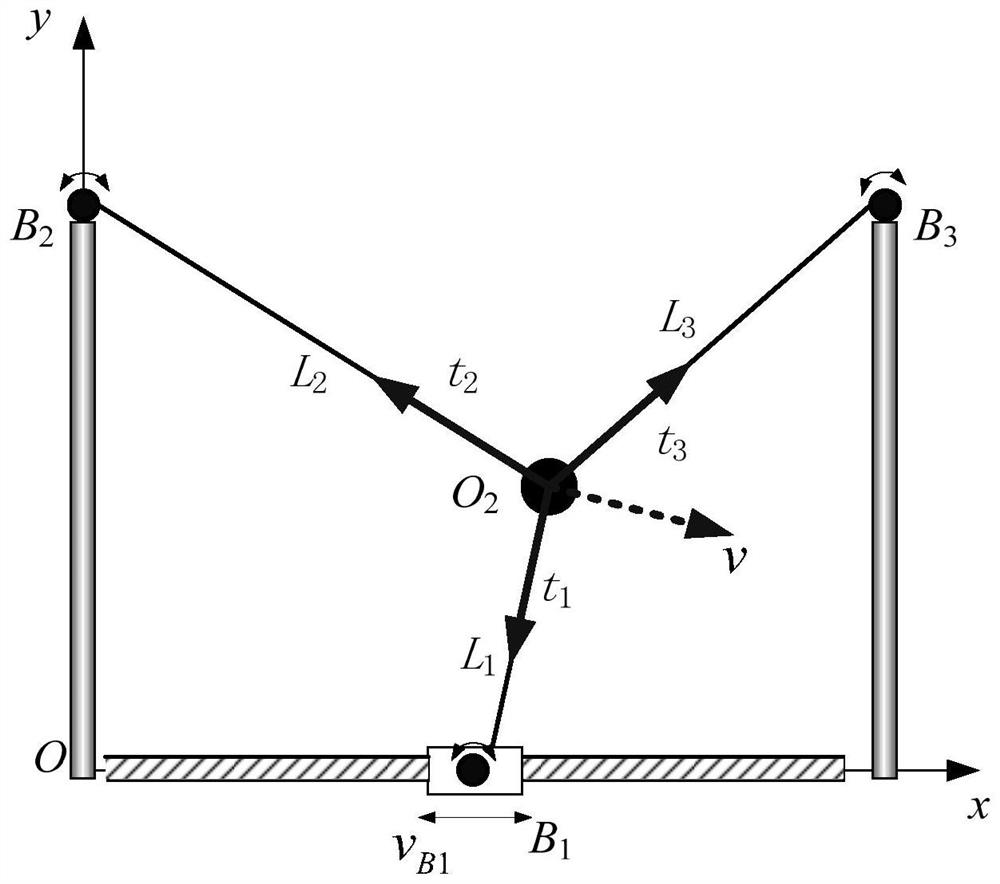
[0036] combine figure 1 , the invention provides a method for evaluating the motion stability of a rigid-flexible lower limb gait rehabilitation training robot, comprising the following steps:
[0037] S1. First, according to the rigid-flexible lower limb gait rehabilitation training robot rigid branch chain B 1 Motion planning and generalized d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More