Boundary detection method of self-walking equipment and self-walking equipment
A detection method and self-propelled technology, applied in transportation and packaging, two-dimensional position/channel control, instruments, etc., can solve problems such as machine misidentification and affecting mowing operations, so as to avoid misjudgment, improve judgment accuracy, The effect of improving the accuracy of boundary judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings.
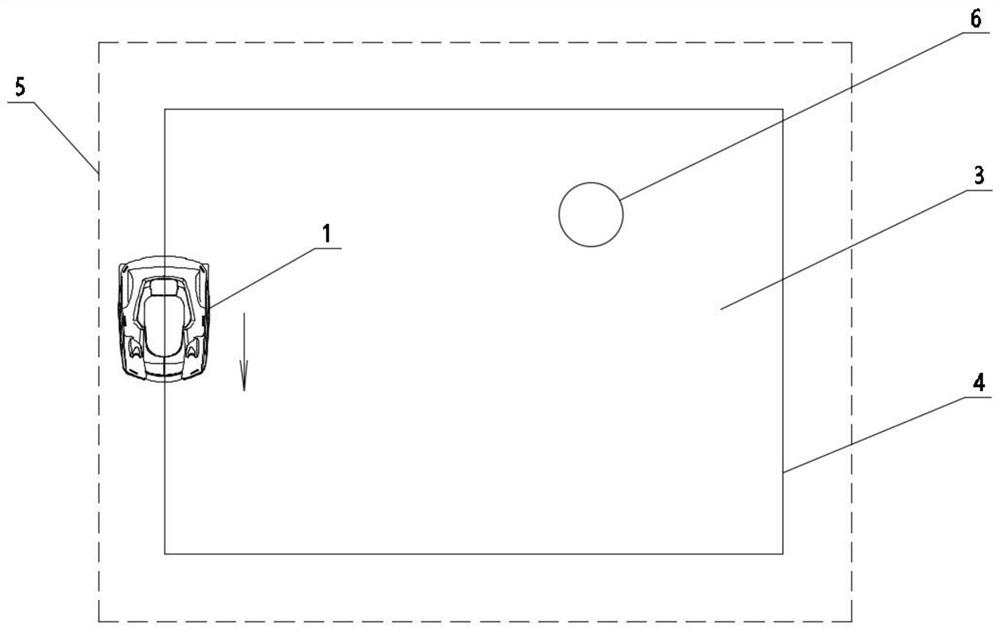
[0034] The boundary detection method of the self-propelled equipment of the present invention is applicable to various self-propelled equipment, and can realize the recognition of the boundary of the working area and obstacles of the self-propelled equipment. This embodiment takes a lawn mowing robot as an example to describe in detail.
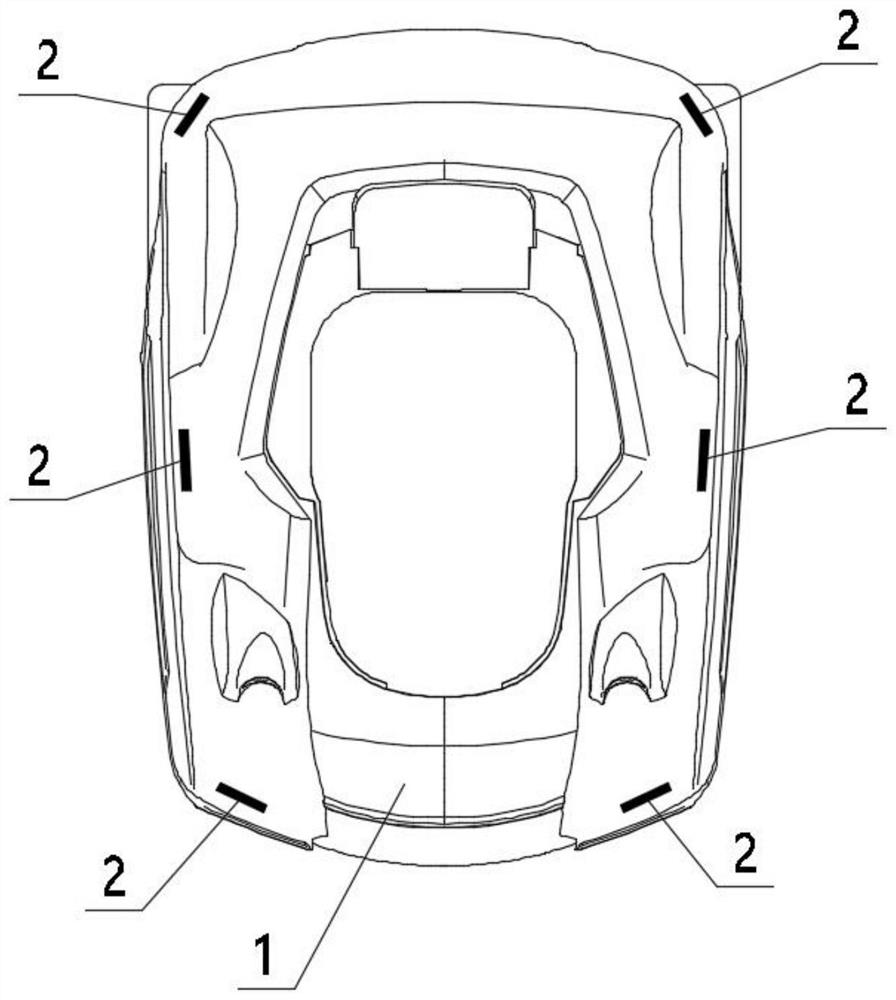
[0035] Such as figure 1 In the lawn mowing robot shown, sensors 2 are evenly distributed around the lawn mowing robot 1 . The sensors are arranged on both sides of the mowing robot, and at least two are arranged on each side. In this embodiment, three sensors are arranged on each side of the mowing robot, which are respectively located at the head, tail and middle of the mowing robot.
[0036] The sensor is a metal detector, which uses the principle of electromagnetic induction and uses a coil with alternating current to ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com