Nonlinear dynamic modeling analysis method for rotary joint type industrial robot
A technology of nonlinear dynamics and industrial robots, which is applied in the fields of instruments, special data processing applications, electrical digital data processing, etc., and can solve problems such as difficult to meet the real-time calculation and control requirements of robots, and the decrease of calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0114] The embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings. The present invention adopts the KUKA KR500-2830MT type industrial robot multi-body system dynamic model.
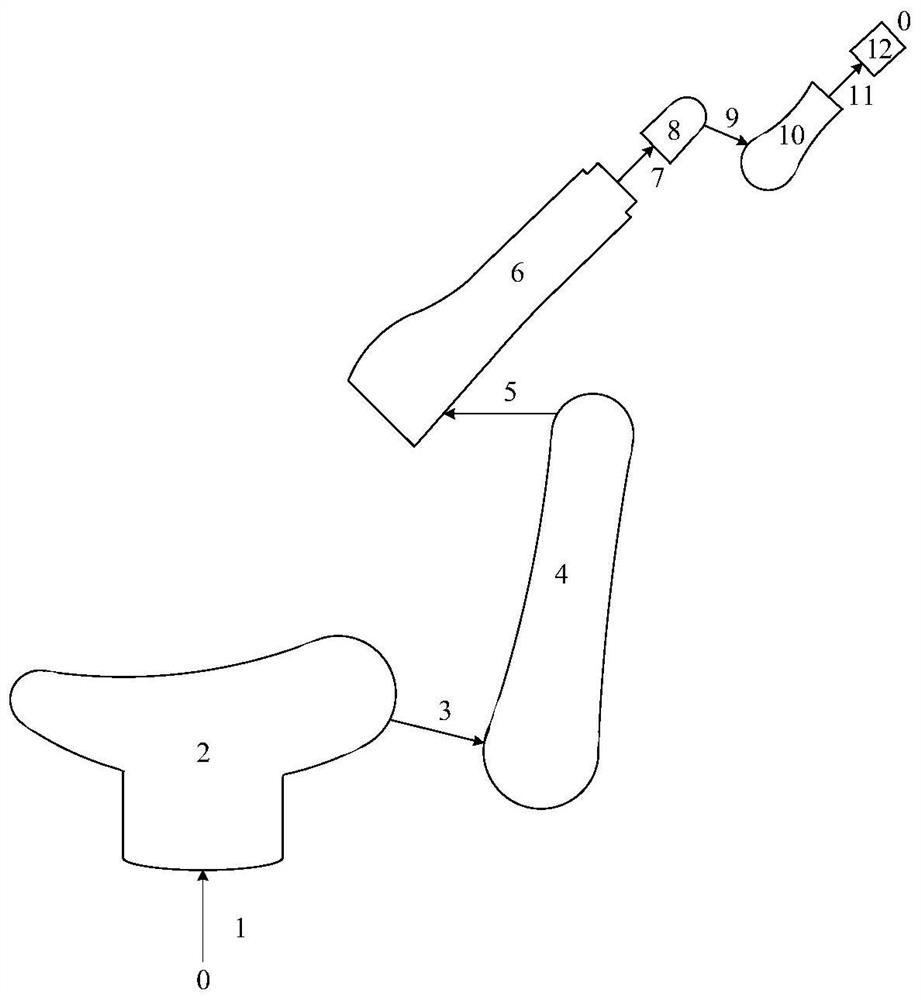
[0115] like figure 1 As shown, the present invention is a nonlinear dynamics modeling analysis method of a rotary joint type industrial robot, wherein: including the following steps:
[0116] Step S1: Transform the three-dimensional solid model of the rotary industrial robot into a robot multi-body system dynamic model composed of body elements and hinge elements, and establish a topological structure diagram;
[0117] S11: Transform the three-dimensional solid model of the rotary industrial robot into a robot multi-body system dynamic model composed of body elements and hinge elements according to the geometric structure, assembly relationship, and connection mode of each component of the rotary industrial robot;
[0118] S12: The con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com