

Vein puncture robot operation trajectory planning method based on ultrasonic image guidance
A technology for venipuncture and trajectory planning, applied in surgical robots, puncture needles, image enhancement, etc., to achieve the effect of fast speed, high degree of automation, and few parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
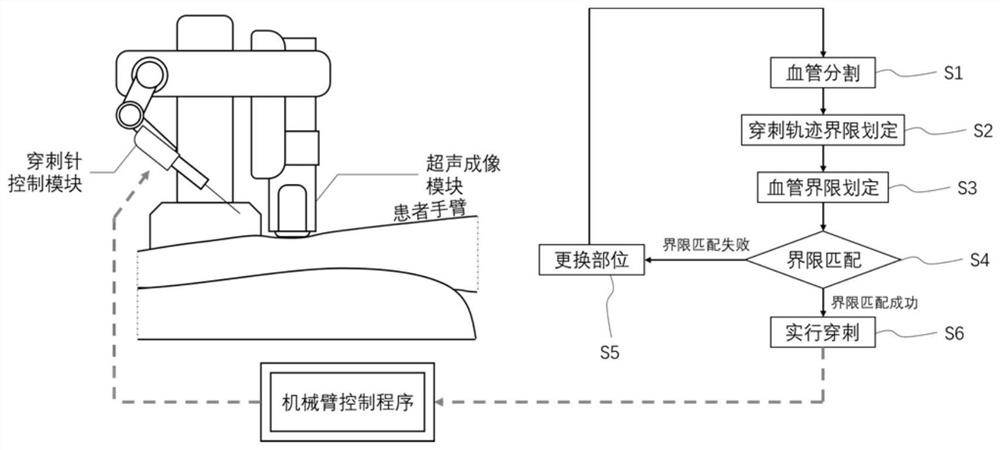
[0046] like figure 1 , The present embodiment provides a puncture venipuncture robot trajectory planning method based on an ultrasound image guided, robots for automatically venipuncture, help the robot trajectory delineated puncture, the puncture needle operation robot arm in a predetermined trajectory, automatic puncture the vein the piercing member piercing robot control vascular puncture.
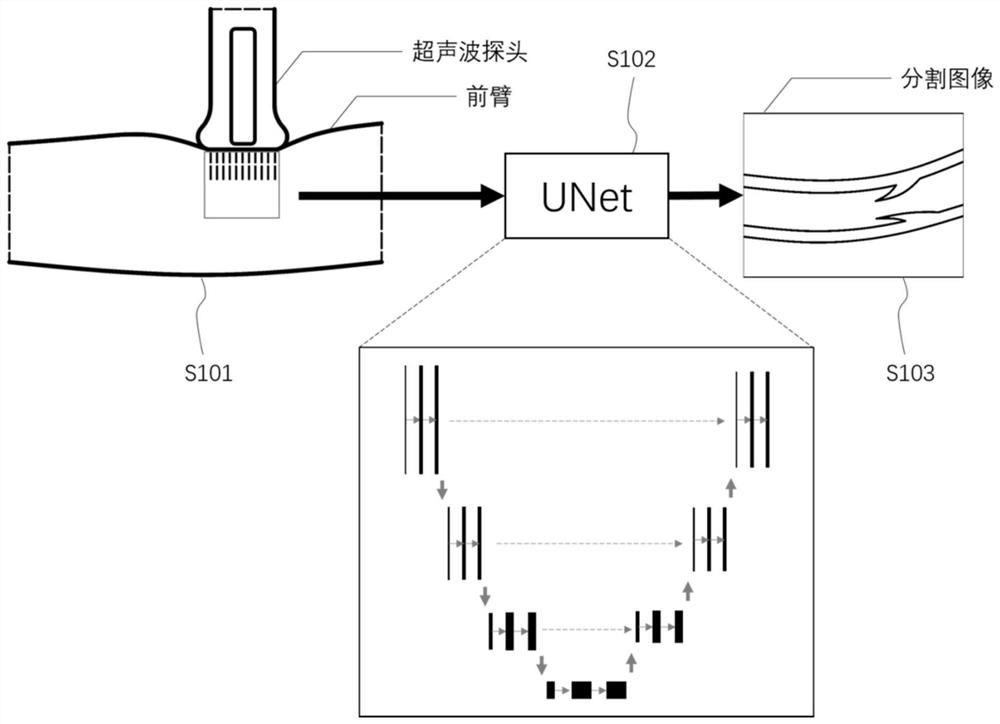
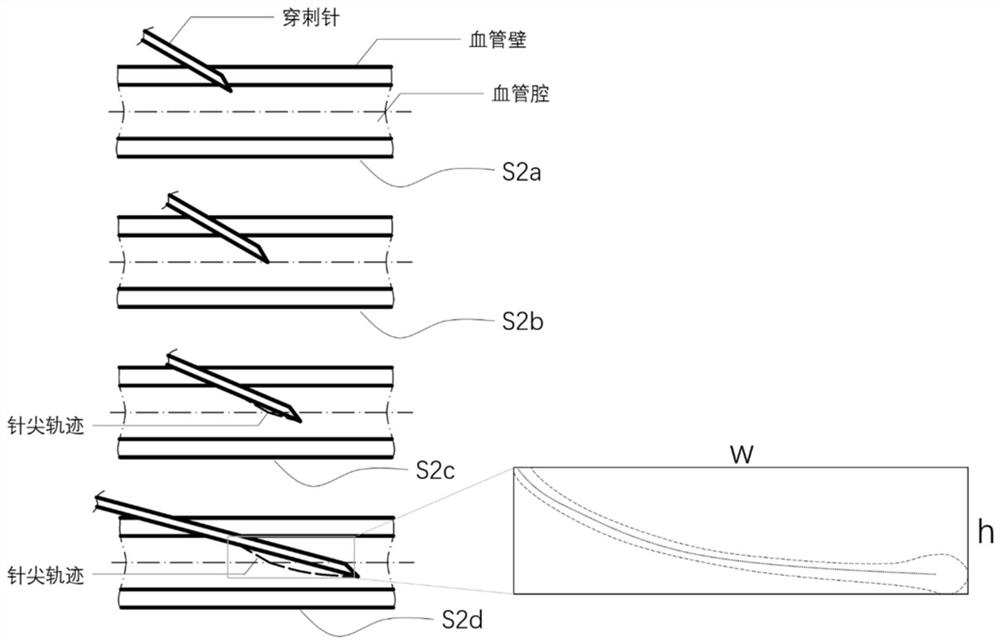
[0047] The first method uses U-Net network framework vascular ultrasound image segmentation; then delineated boundaries and vascular puncture track limits from the segmentation result; and matching of the limits, determines the feasibility of the puncture; last puncturing implement predetermined trajectory, the above It includes the following steps:
[0048] Vessel segmentation Step S1: acquiring an ultrasound image of a blood vessel puncture site to be an object, and acquires from the vessel segmentation FIG IVUS image. FIG vessel segmentation requires obtaining vascular and vascular divid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More