

Optimal path training method for unmanned aerial vehicle to avoid columnar obstacle to reach target point
A technology of optimal path and training method, applied in vehicle position/route/height control, non-electric variable control, instrument and other directions, which can solve problems such as slow training speed and poor robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
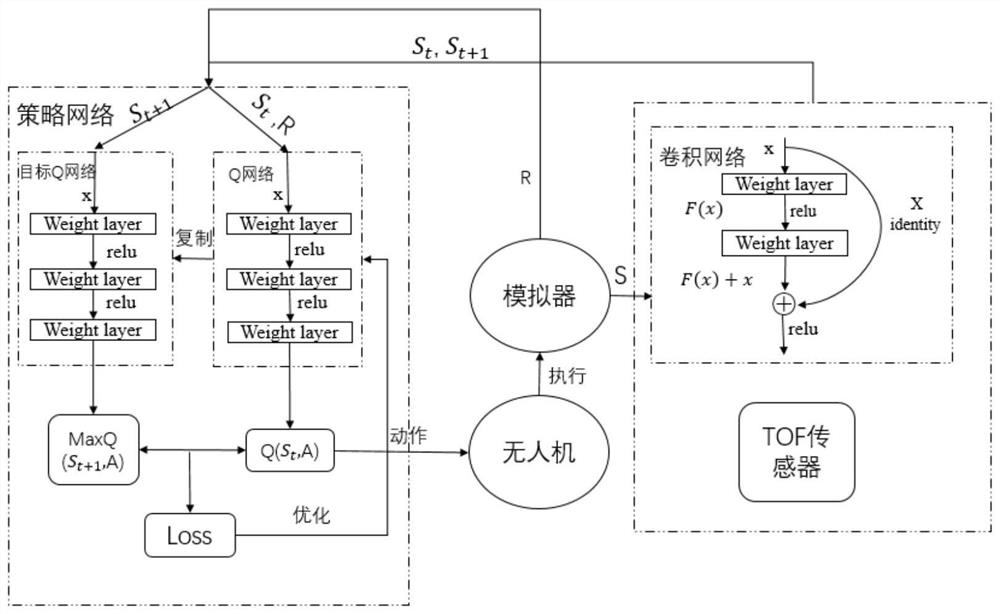
[0036] The optimal path training method for UAVs to avoid columnar obstacles and reach the target point based on reinforcement learning, including:
[0037] step one:
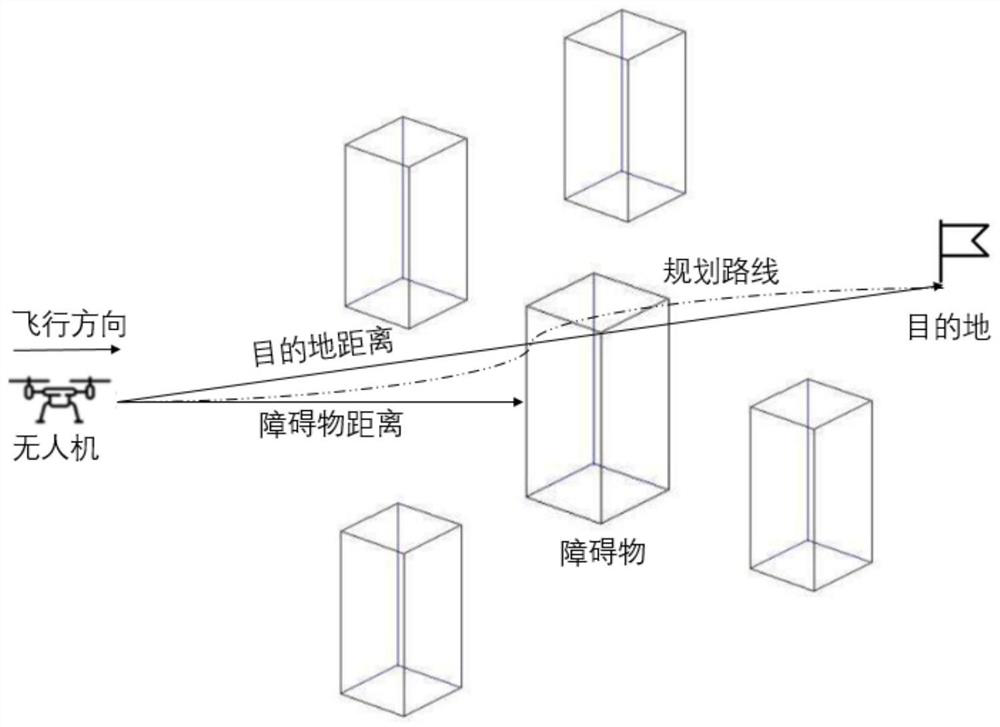
[0038]Construct a simulation environment simulator, which will be used to learn the UAV path selection strategy, and its visualization part is implemented based on the unity3D engine. These include Drone, Drone Start, Drone End, Columnar Obstacles. Set the speed and altitude of the drone to be constant in the environment simulato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More