

Robot disordered grabbing method and system based on machine vision and storage medium
A technology of machine vision and robotics, applied in the field of 3D disorderly grasping, can solve problems such as limitations and poor flexibility, and achieve the effect of improving accuracy and integrity, improving accuracy, and improving target detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings, and the described embodiments should not be considered as limiting the present invention, and those of ordinary skill in the art do not make any All other embodiments obtained under the premise of creative labor belong to the protection scope of the present invention.
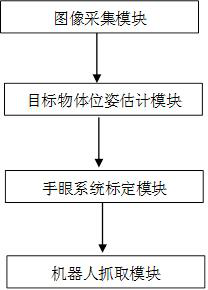
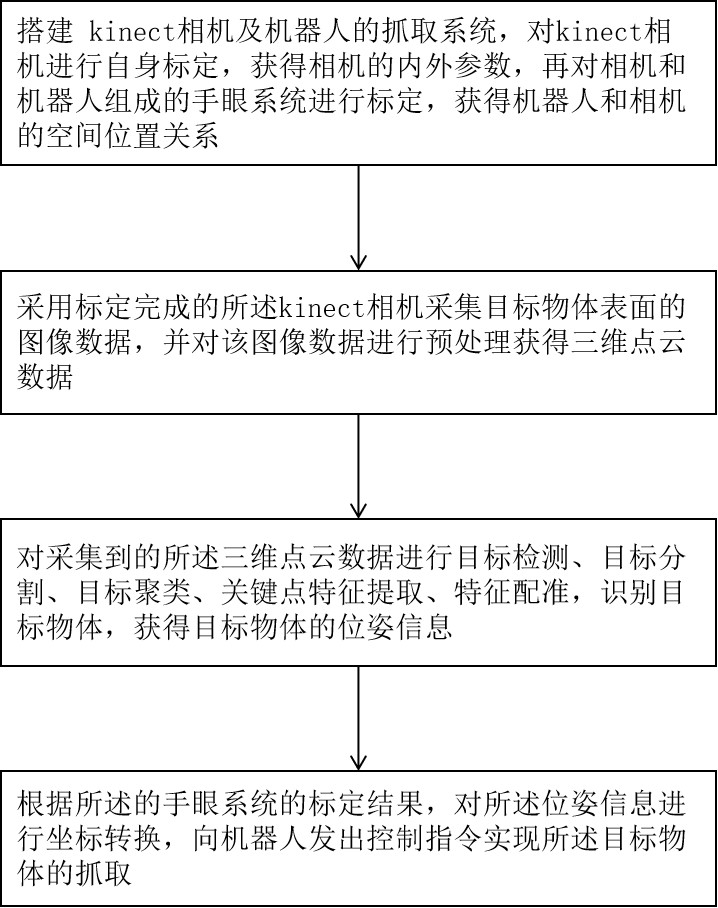
[0035] see figure 1, is a robot disorder grasping system based on machine vision provided by an embodiment of the present invention, the system includes: an image acquisition module, a target pose estimation module, a hand-eye system calibration module, and a robot grasping module.
[0036] Wherein, the image acquisition module uses the kinect camera that has been calibrated to acquire image data on the surface of the target object, and preprocesses the image data to obtain three-dimensional point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More