

An automatic folding multi-rotor water-air amphibious robot
A multi-rotor and robot technology, applied in the direction of the fuselage, aircraft parts, aircraft control, etc., can solve the problems of insufficient underwater navigation stability and accuracy control, static release requiring foreign objects assistance, and large underwater driving resistance. To achieve the effect of reducing the difficulty of carrying, reducing the volume and weight, and increasing the speed capability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
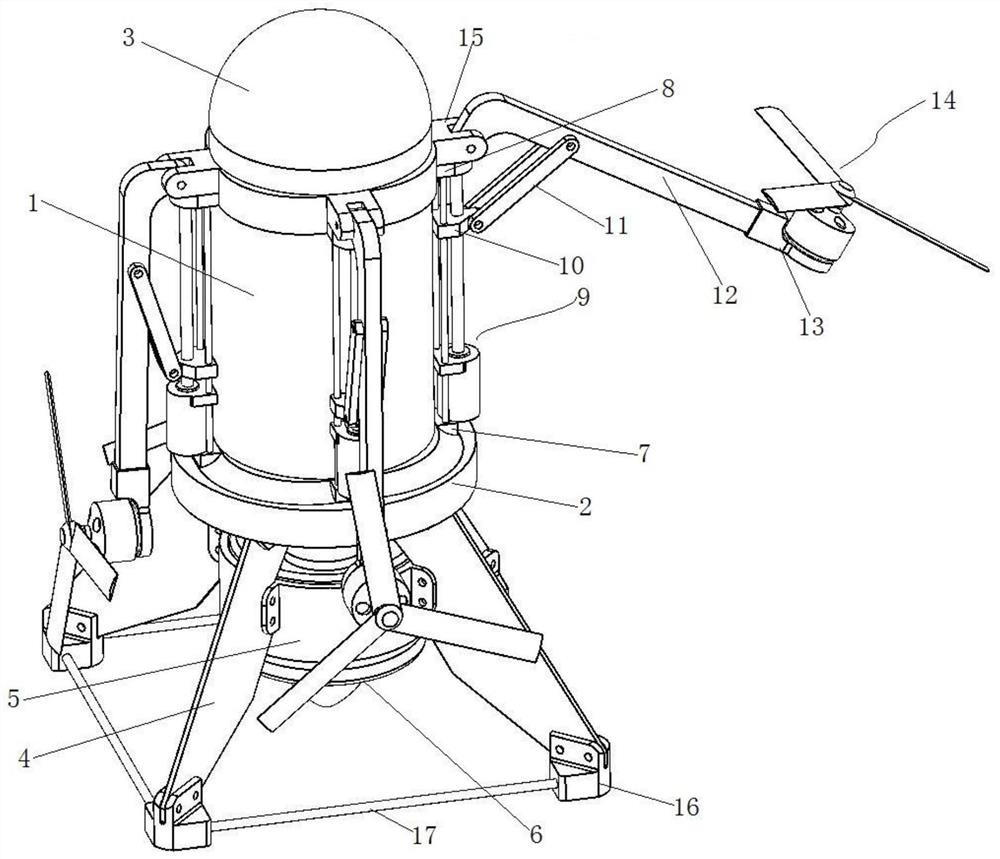
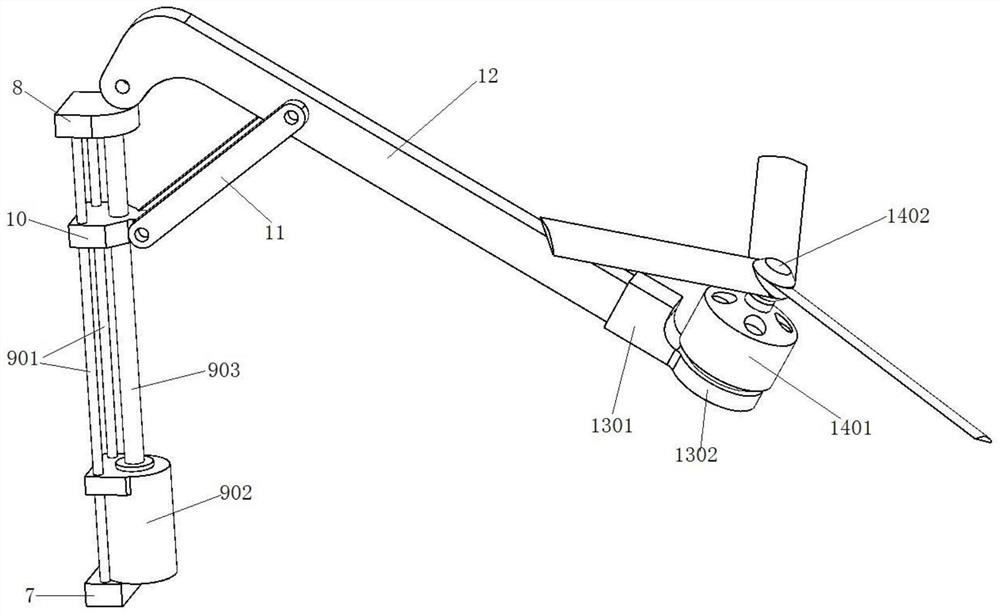
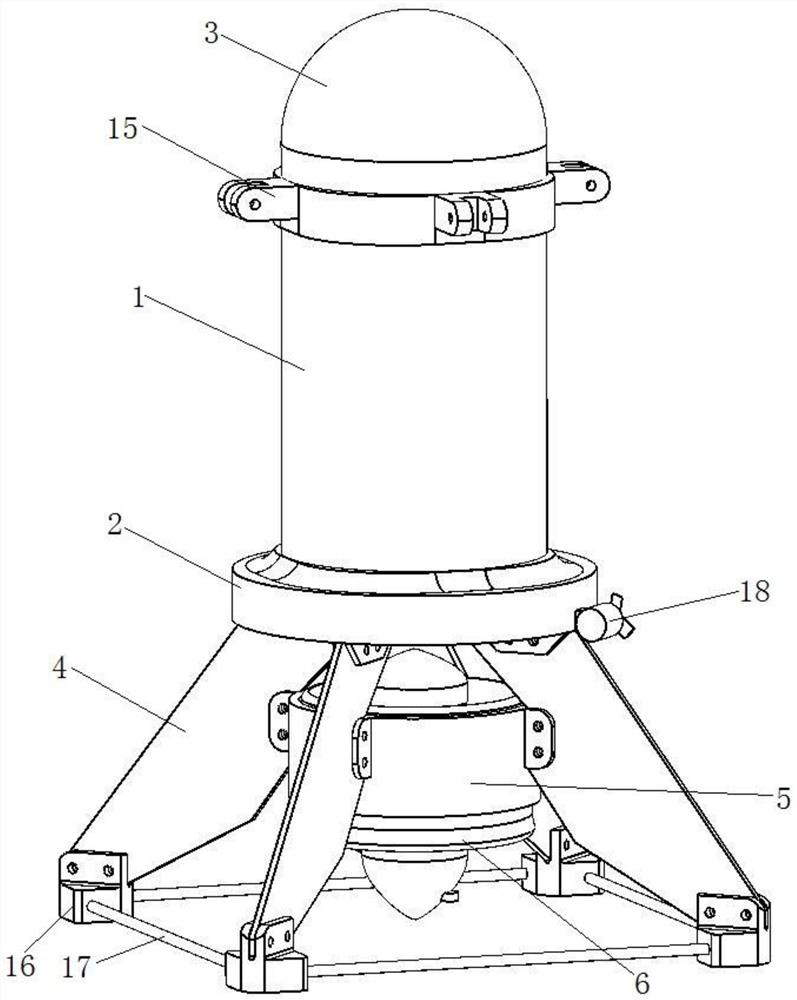
[0048] like Figure 1 to Figure 4 As shown, an automatic folding multi-rotor water-air amphibious robot includes a main body cabin 1, the tail of the main body cabin 1 is connected with four sets of tail wings 4, and an underwater propeller 6 is installed between several of the tail wings 4; Four sets of arm control units are respectively arranged around the main body cabin 1 in a centrally symmetrical manner; each of the arm control units has a base 7 and a baffle 8 arranged coaxially and parallelly. The base 7 and the baffle 8 They are respectively fixed at the tail and the head of the main body compartment 1. An axial sliding assembly 9 is arranged between the base 7 and the baffle 8, and an arm support is hinged on the slider 10 of the sliding assembly 9. 11. One end of the arm support 11 away from the slider 10 is hinged to the arm 12; A rotor unit 14 is connected through the motor base 13 ; a roll axis control unit 18 is also provided on the outer circumference of the m...
Embodiment 2
[0075] This embodiment provides a structure and a connection and installation method of a tail fin.
[0076] like Figure 5 As shown, the tail fin 4 has an irregular polygonal shape, the outer side is straight and the inner side is multi-folded and changed; the tail 4 has an upper mounting portion 401, a lower mounting portion 403 and a vertical mounting portion 402. The upper mounting portion 401. The lower mounting portion 403 and the vertical mounting portion 402 are provided with mounting screw holes; the upper mounting portion 401 is screwed and fixed with a pair of connecting pieces below the main body compartment 1; The mounting portion 402 is screwed and fixed with the connecting piece on the outer circumference of the propeller fixing seat.
[0077] like Image 6 As shown, the foot stand 16 has an integrally formed mounting block 1601 , a pair of connecting pieces 1602 are provided at the diagonal of the mounting block 1601 , and the lower mounting portion 403 is in...
Embodiment 3
[0079] This embodiment provides the motion control method of the robot in the water in the first embodiment.
[0080] like Figure 7 to Figure 10 As shown, in order to facilitate description and understanding, the motors on the robot are re-labeled according to the serial numbers; they are No. 1 motor 19, No. 2 motor 20, No. 3 motor 21, No. 4 motor 22 (No. 1 to No. 4 are rotor units. 14 on the brushless motor); the fifth motor 23 (the drive motor of the roll axis control unit); the sixth motor 24 (the propeller drive motor).
[0081] When switching to the underwater mode in the air, after the lower part of the robot (the lower part of the main body cabin 1 and the tail 4) is vertically immersed in the water, the motors No. 1 to No. 4 are all stopped and the four arms 12 are recovered, Gravity is greater than buoyancy, so it sinks naturally. Since the center of buoyancy is located in the front half, it will maintain a vertical direction during the sinking process. After sinki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More