

Control system and method for intelligent flaming obstacle clearing unmanned aerial vehicle
A control system and control method technology, applied in the field of unmanned aerial vehicles, can solve the problems of low intelligence, achieve the effect of speeding up the processing, reducing the difficulty, and avoiding the effect of processing invalid image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] A control system for intelligent fire-breathing drones, including camera components, fire-breathing components and controllers installed on the drone, fire-breathing components including explosion-proof fuel tanks, high-temperature-resistant nozzles, igniters and nozzles; the nozzles pass through The high temperature resistant nozzle is connected to the explosion-proof fuel tank, the nozzle is provided with an igniter and a windshield, the connection between the high temperature resistant nozzle and the nozzle is provided with a solenoid valve, and the solenoid valve is electrically connected with the processor of the fire spray assembly, and the explosion-proof fuel tank is connected to a micro oil pump and a micro oil pump in electrical connection with the processor of the fire-breathing assembly;
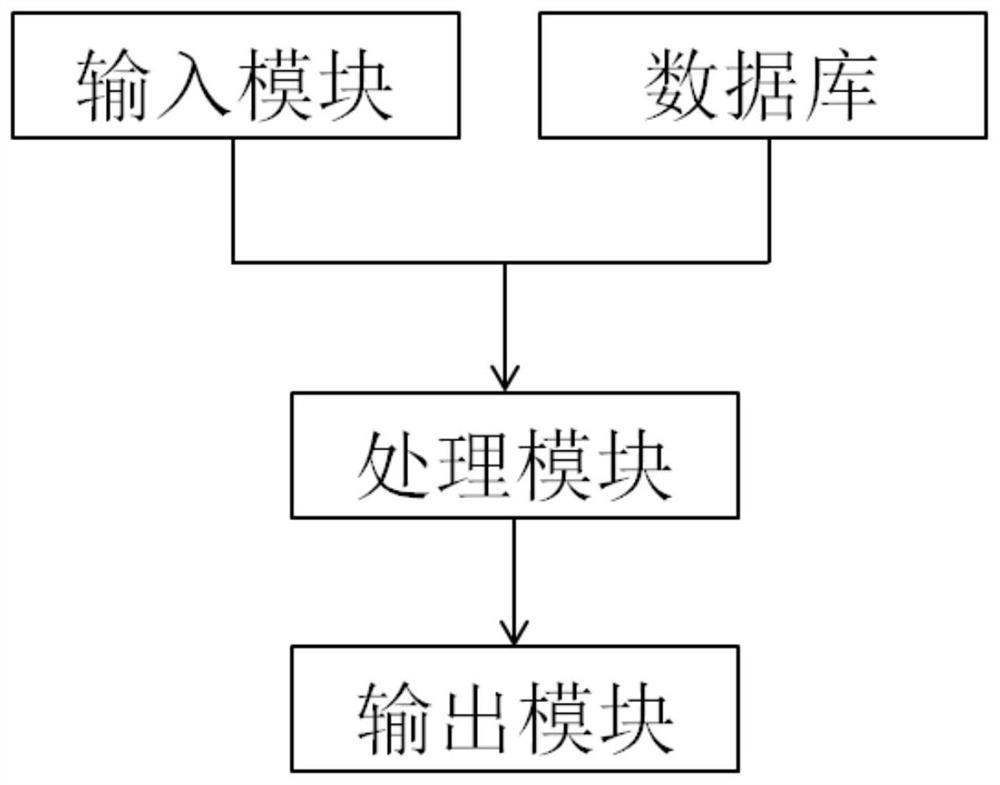
[0041] like figure 1 As shown, the controller includes an input module, a database, a processing module and an output module, wherein:
[0042] The input module is used t...
Embodiment 2
[0051] Compared with the first embodiment, the only difference is that it also includes a distance sensor (specifically, an infrared rangefinder) installed on the UAV; the distance sensor is connected in communication with the input module, and the input module is also used to obtain the distance sensor collection. The distance information between the UAV and the obstacle, and the current distance information is generated; the processing module is also used to receive the current distance information, and process the current distance information according to the second preset threshold, if the current distance information is greater than the second preset Threshold, then drive the drone to fly towards the obstacle. Specifically, in this embodiment, the second preset threshold is 0.2 meters; after the drone reaches the target point, the distance sensor receives a distance detection instruction, and the distance sensor measures the current distance between the drone and the obsta...
Embodiment 3
[0054] Compared with the first embodiment, the only difference is that it also includes a thermal imager installed on the UAV; the input module is also used to obtain the burning image of the obstacle photographed by the thermal imager to generate a heat map; It is used to accept and process the heat map, extract the obstacle image and wire image in the image, input it into the pre-established two-dimensional coordinate model, and locate the intersection coordinates of the obstacle image and the wire image; the judgment module is also used to judge the heat map. The color information at the coordinates of the intersection point. If the color information is red, the drone will be driven to fly above the obstacle.
[0055] In another embodiment, the input module is further used to obtain the combustion flame of the obstacle photographed by the camera assembly; the processing module is also used to judge the flame size, and if the flame size is greater than a preset threshold, gen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More