

Rope-driven parallel bionic stomatognathic robot with higher pair constraints
A rope-driven, bionic mouth technology, applied in the field of bionic robots, to solve the swing problem, reduce weight, and achieve good bionic effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
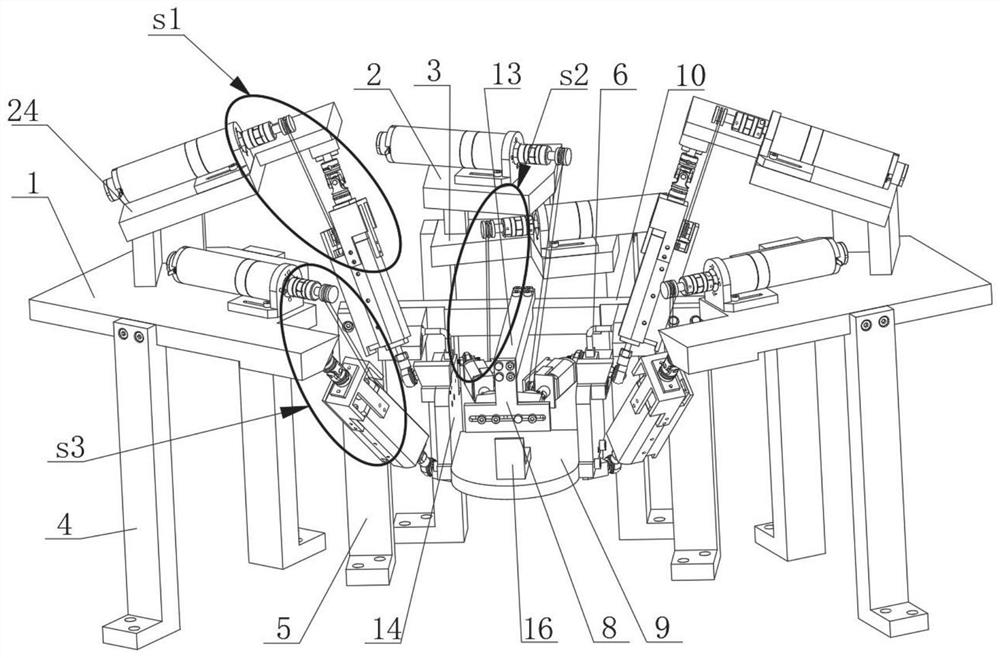
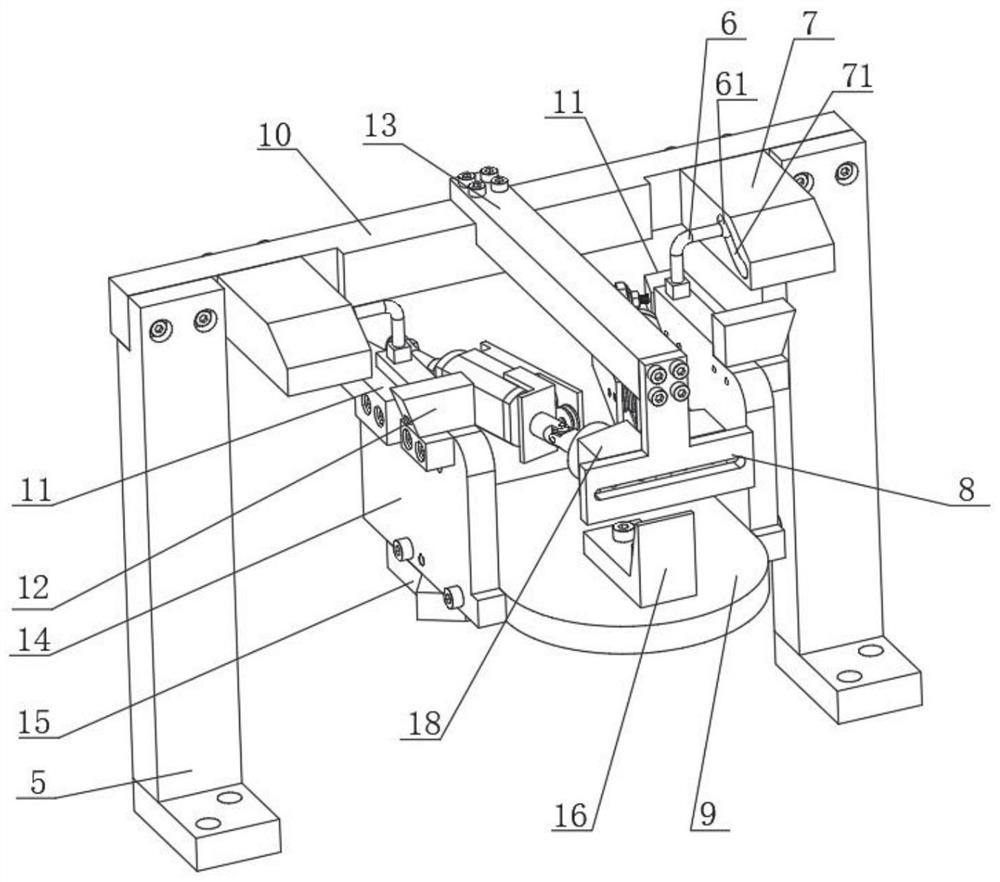
[0035] Such as figure 1 and figure 2 As shown, the high pair constrained rope-driven parallel bionic mouth and jaw robot of this embodiment includes:
[0036] The maxillary static platform 8 is connected to the fixedly installed articular surface mounting plate 10 through an intermediate connector 13;
[0037] The mandibular dynamic platform 9 is located below the upper jaw static platform 8, and the two sides of the mandibular dynamic platform 9 are symmetrically provided with mandibular side plates 14;
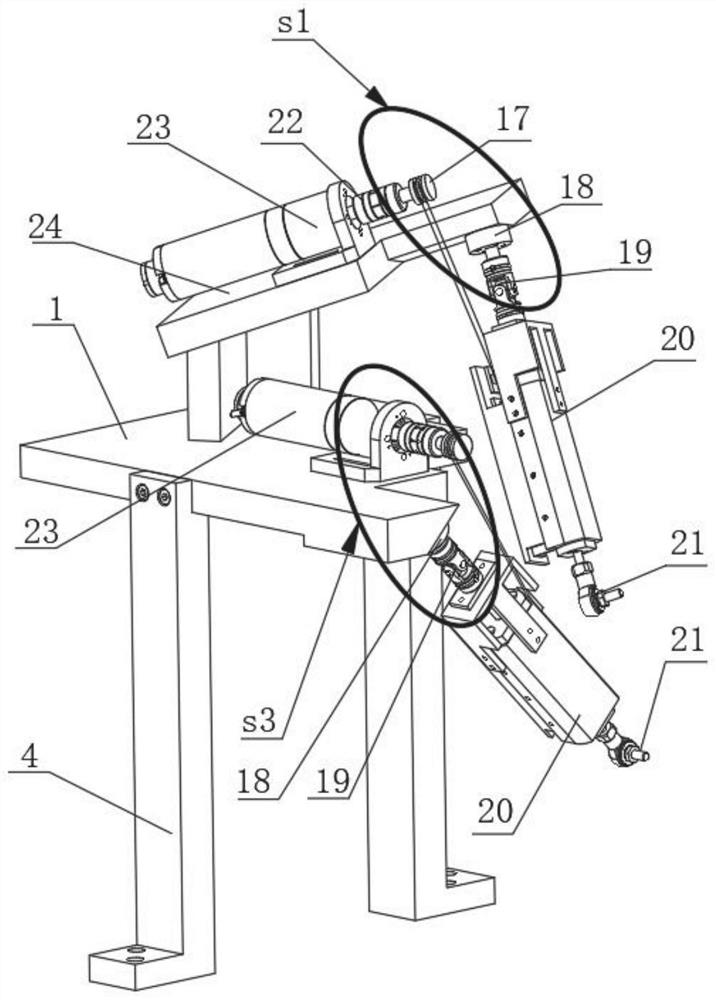
[0038] And three sets of UPS rope-driven branch chains, three sets of UPS rope-driven branch chains are located around the mandibular dynamic platform 9 and the maxillary static platform 8, and are used to simulate the three groups of muscles of the human temporalis, masseter and lateral pterygoid muscles respectively. The UPS rope-driven bran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More