

Method for monitoring position and movement path of field robot
A motion path, robot technology, applied in the field of image processing, to achieve the effect of improving processing speed, simple algorithm, and avoiding computational workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] Now in conjunction with accompanying drawing, the present invention is described in detail:
[0032] Specifically, a method for monitoring the position of a field robot and its motion path provided by the present invention includes the following aspects:
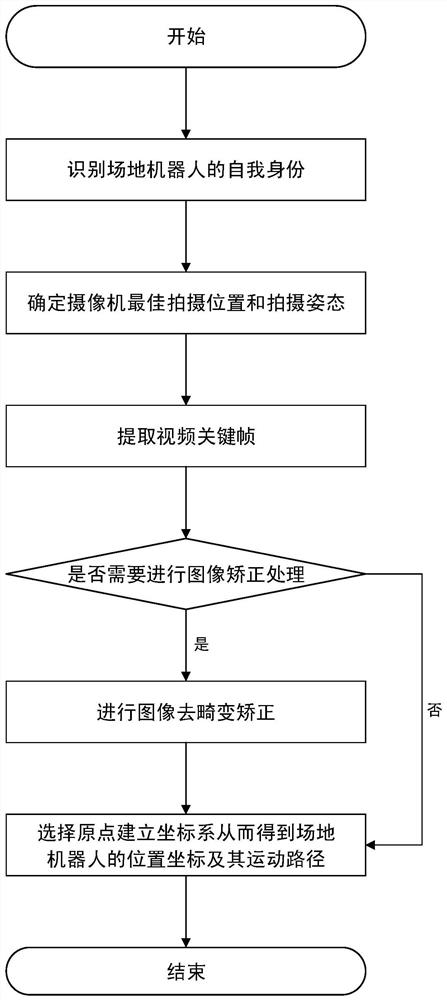
[0033] refer to figure 1 , is a flow chart of a method for monitoring the position of a field robot and its motion path provided by the present invention, including the following steps: installing a mobile light source on the field robot, determining the shooting position and shooting posture of the camera, setting Four reference points, extract video key frames, perform image de-distortion correction, select the origin to establish a coordinate system, so as to obtain the position coordinates and motion path of the field robot.
[0034] Such as figure 2 Auxiliary illustration for image de-distortion correction processing corner relationship.
[0035] Specifically, a method for monitoring the position of a field r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More