

Visual inspection and obstacle avoidance system for industrial robot
An industrial robot and visual inspection technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to record and trace back the running state of industrial robots, low processing speed requirements for visual inspection algorithms, and low operating efficiency of industrial robots. , to achieve the effect of rapid convergence, reasonable obstacle avoidance path planning, and avoidance of obstacle avoidance failure accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
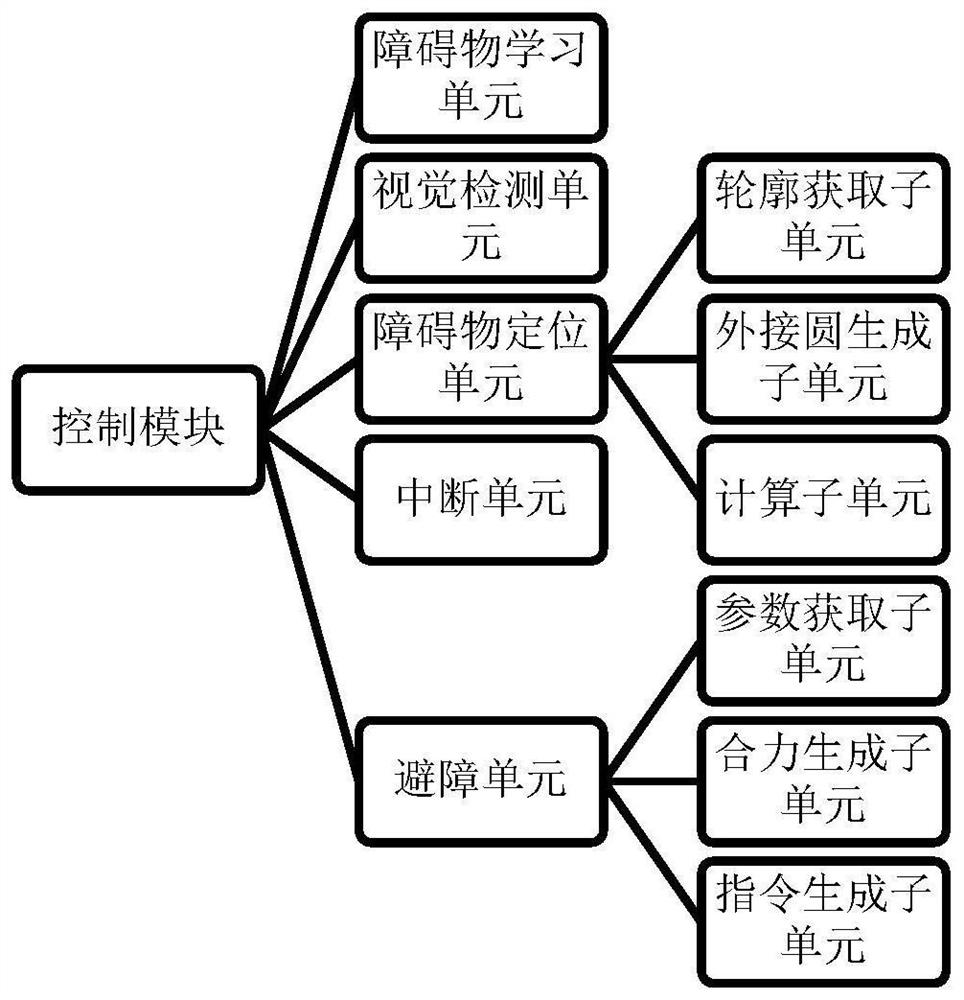
[0027] An industrial robot visual detection and obstacle avoidance system, including an industrial robot body, a camera module, a control module, a block chain module, and a wheel train module. The camera module includes a binocular camera set at the front end of the robot body for collecting real-time image, and transmit the real-time image to the control module; the control module is set inside the industrial robot body, and is used to receive the target point sequence in the target instruction sent by the user terminal, and establish a travel task list; for the binocular camera The collected real-time images are received, and the obstacles in front are initially identified through the classification algorithm, and the coordinates and sizes of the obstacles are further determined, the current traveling task is interrupted, and the obstacle avoidance task is performed. According to the current operating status of the industrial robot, the obstacle Coordinates and size and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More