Multi-joint robot control method based on adaptive neural network sliding mode control
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A multi-joint robot and neural network control technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficult to establish multi-joint robot models
Active Publication Date: 2021-01-15
SHANGHAI UNIV
View PDF5 Cites 1 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Therefore, it is difficult to establish an accurate multi-joint robot model in a practical system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
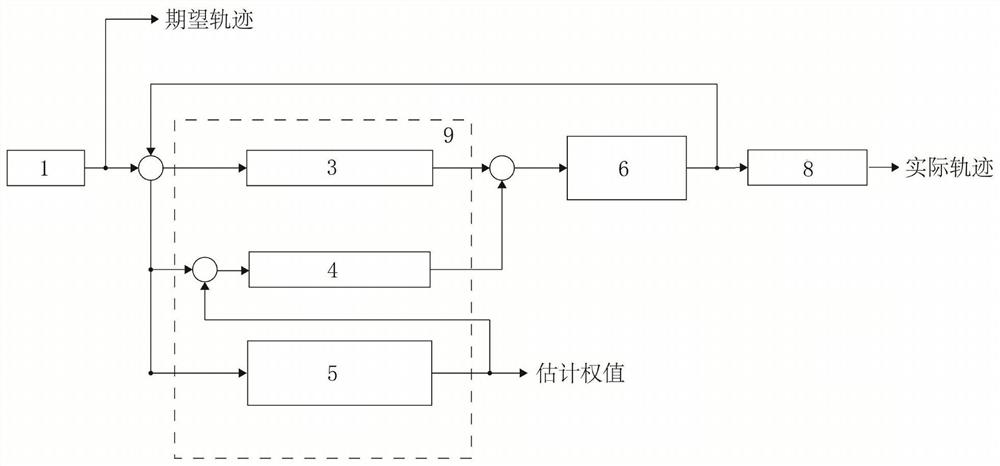
[0063] see Figure 1-Figure 2 , a multi-joint robot control method based on adaptive neural network sliding mode control, the operation steps are as follows:
[0064] a. Construct the model of the multi-joint robot:
[0065] The dynamic model of the multi-joint robot is established by using the Lagrangian dynamic equation as follows:
[0066]
[0067] In the formula, is the inertia matrix of the articulated robot, Indicates the centrifugal force and Gothic force, is the gravity term, Indicates the system uncertainty caused by modeling errors, additional disturbances, etc., ΔD(q), ΔG(q) is the matrix D(q), respectively, Modeling error of G(q), τ d (t) is the additional disturbance force, are the rotation angle, angular velocity and angular acceleration of the joint, T(t) is the output torque, n is the number of joints; for a double-joint robot, n=2, the matrix D(q), and G(q) expressions are as follows:
[0068]
[0069]
[0070]
[0071] In the for...
Embodiment 2
[0111] This embodiment is basically the same as Embodiment 1, especially in that:
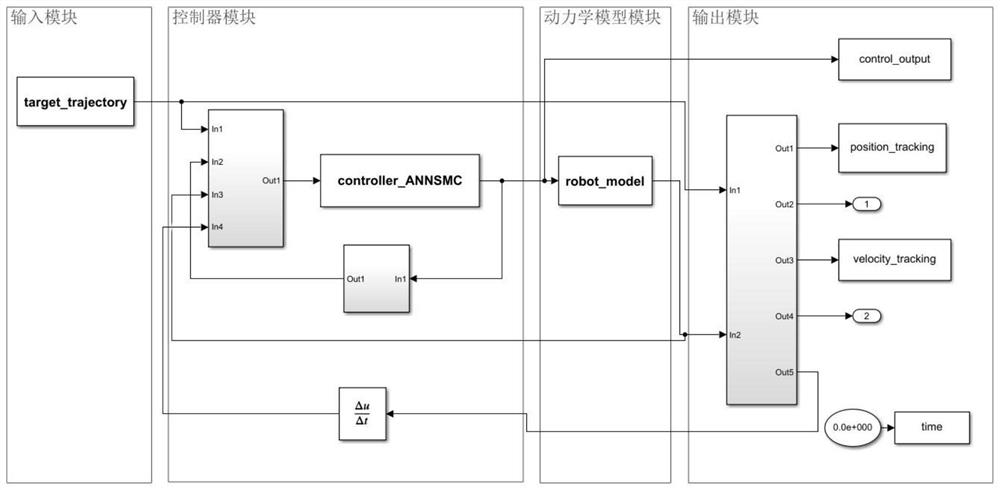
[0112] refer to Figure 1 to Figure 5 , a multi-joint robot control method based on an adaptive neural network sliding mode controller, the operation steps are as follows:
[0113] a. Model of multi-joint robot
[0114] According to the content of the above-mentioned content of the invention a, the dynamic model of the double-joint robot is as follows:
[0115]
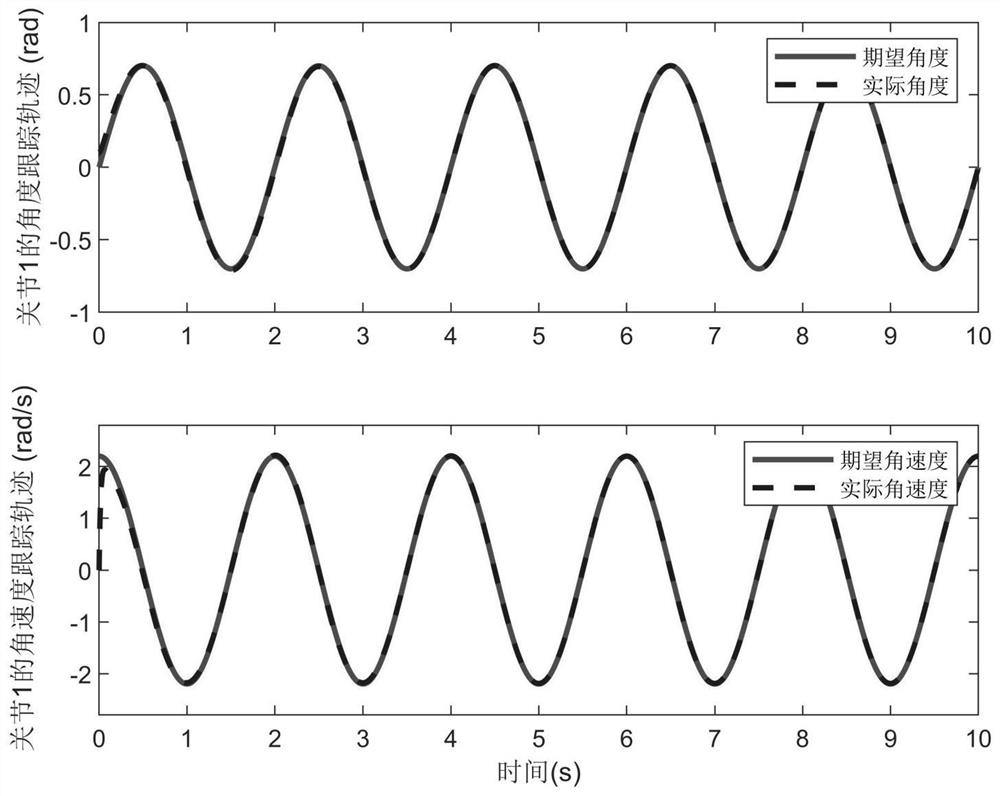
[0116] In the formula, q=[q 1 q 2 ] T ,q 1 ,q 2 is the motion angle of the robot joint. m 1 =4.58kg, m 2 =6.52kg, l 1 = 0.3m, l 2 =0.35m, g=9.8m / s 2 , where Kg is mass in kilograms, m is length in meters, and s is time in seconds. The initial position is q(0)=[0.1 0.6] T , Interference is set to
[0118] According to the content of the above-mentioned content of the invention b, the multi-joint robot controller based on the adaptive neural network sliding ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a multi-joint robot control method based on an adaptive neural network sliding mode controller, and belongs to the field of multi-joint robotcontrol system design. The methodcomprises the following operation steps of 1) establishing a kinetic model of a multi-joint robotsystem by utilizing a Lagrange kinetic equation; 2) designing a control system model of the multi-joint robot based on adaptive neural network sliding mode control; 3) establishing a control simulation model of the multi-joint robot in MATLAB / Simulink; and 4) through a simulation experiment, analyzingan angle and angular velocitytracking error and an error convergence condition of the multi-joint robot under the action of the adaptive neural network sliding mode controller. The method has innovativeness and simulation basis, can solve the defects of large error, insufficient robustness and the like in the existing multi-joint robot motion control, and has important guiding significance for the design of a multi-joint robot controlsystem.
Description
technical field [0001] The invention relates to an optimal control method of a multi-joint robot based on adaptive neural network sliding mode control, which is applied to the field of motion control of multi-joint robots. Background technique [0002] The multi-joint robot is a complex system, which has the characteristics of strong coupling, fast time-varying, and nonlinearity, and is affected by uncertain factors such as inaccurate models, parameter changes, friction, and external disturbances. Therefore, it is difficult to establish an accurate multi-joint robot model in a practical system. The radial basis function neural network has a high degree of nonlinear approximation mapping ability and online learning ability. The control system designed by using the radial basis function neural network does not depend on the mathematical model of the multi-joint robot, and has strong real-time performance. Therefore, the radial basis function neural network is very suitable fo...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More