

Online grinding method of weld joint grinding and polishing robot
A robot, grinding and polishing technology, applied in grinding/polishing equipment, machine tools suitable for grinding workpiece edges, grinding machines, etc., to meet the requirements of high positioning accuracy, save costs, and realize the effect of real-time adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
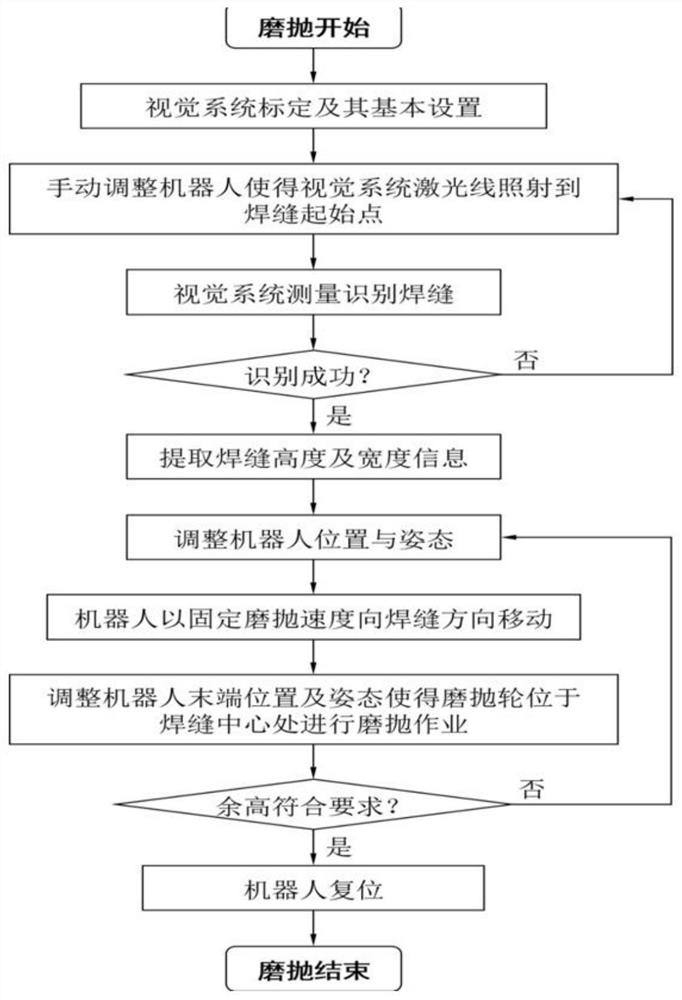
[0032] Such as Figure 1 to Figure 3 As shown, the welding seam grinding and polishing robot online grinding method related to the present invention, the specific steps are as follows:
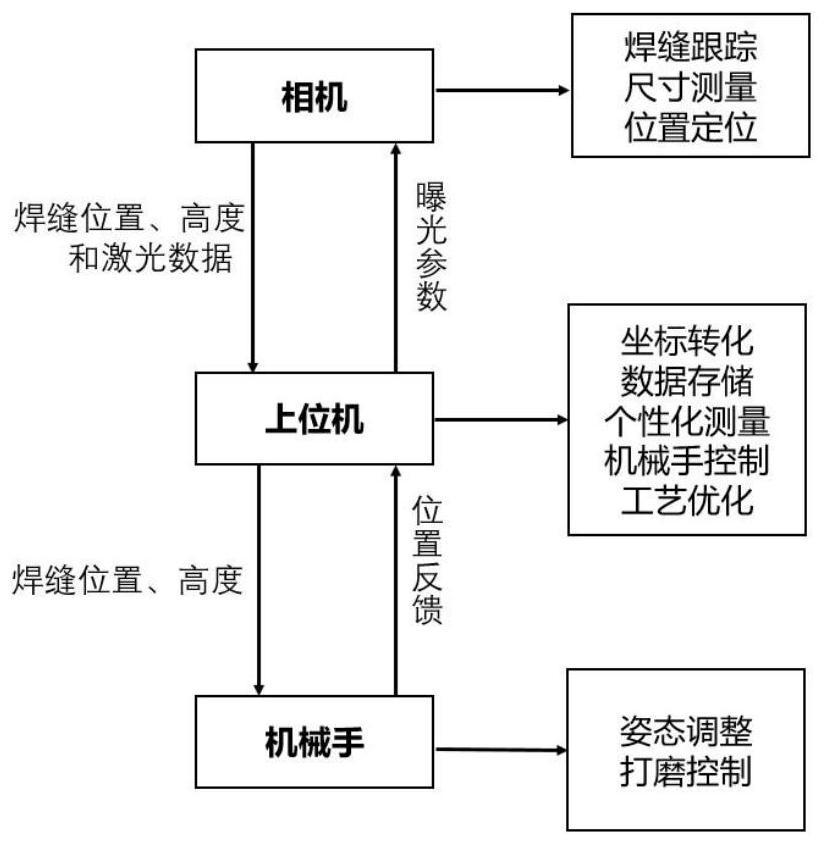
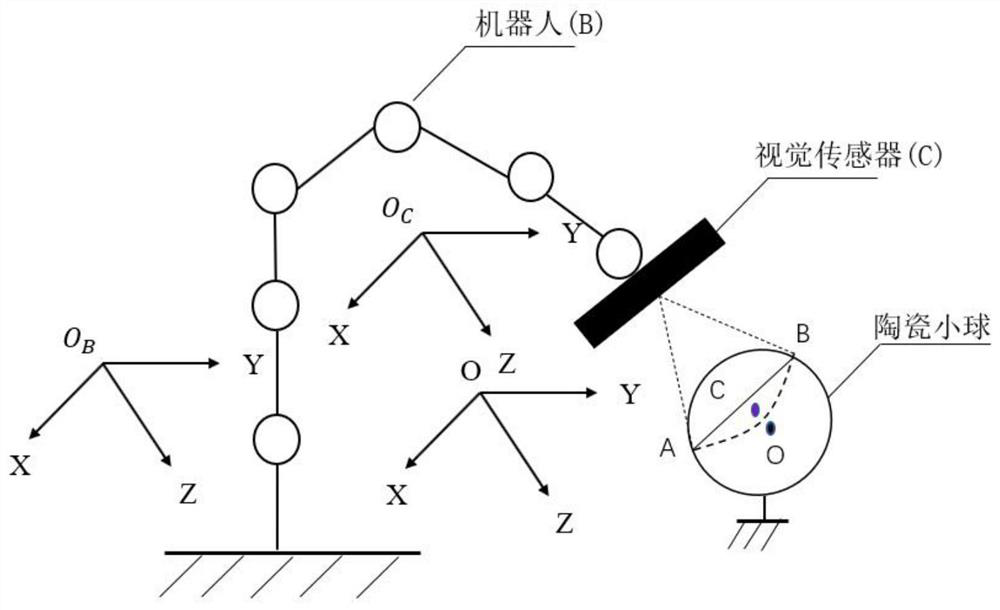
[0033] Step 1: Install the vision system and grinding system on the robot body, and determine the transformation relationship between robot coordinates and visual coordinates through hand-eye calibration. Specifically: use the three-point method to determine the coordinates of the grinding wheel, and control the end effector of the robot to make the camera scan the outline of the ball at different positions and attitudes to obtain the hand-eye change matrix of the visual coordinates and robot coordinates.
[0034] The hand-eye calibration matrix is as follows: the visual system is fixed on the robot end effector, that is, the relationship between the camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More