

B-spline surface fitting method and device based on dense point cloud
A spline surface, dense point cloud technology, applied in 3D image processing, image data processing, 3D modeling and other directions, can solve the problem of difficulty in accurately determining the size of the target, affecting the speed and effect of acquisition and synthesis, and camera position setting errors and other problems, to achieve the effect of improving algorithm efficiency, strong applicability, and improving fitting speed and fitting accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
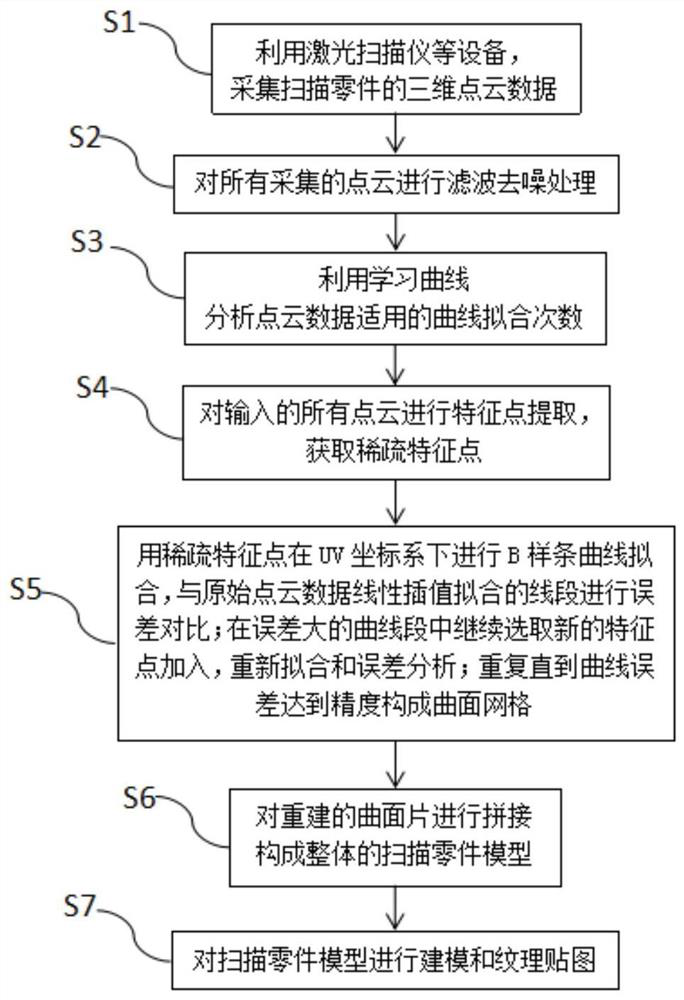
[0074] Such as figure 1 As shown, the present invention provides a kind of B-spline surface fitting method based on dense point cloud, comprising:
[0075] Step S1, using a laser scanner device to collect 3D point cloud data of the scanned part;
[0076] Step S2, performing filtering and denoising processing on all collected 3D point cloud data;
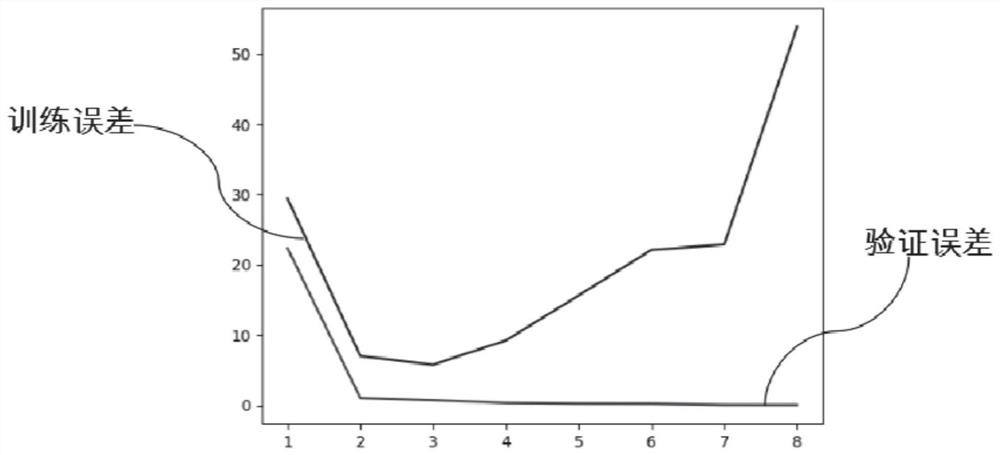
[0077] Step S3, using the learning curve to analyze the number of curve fitting times applicable to the three-dimensional point cloud data after filtering and denoising processing;
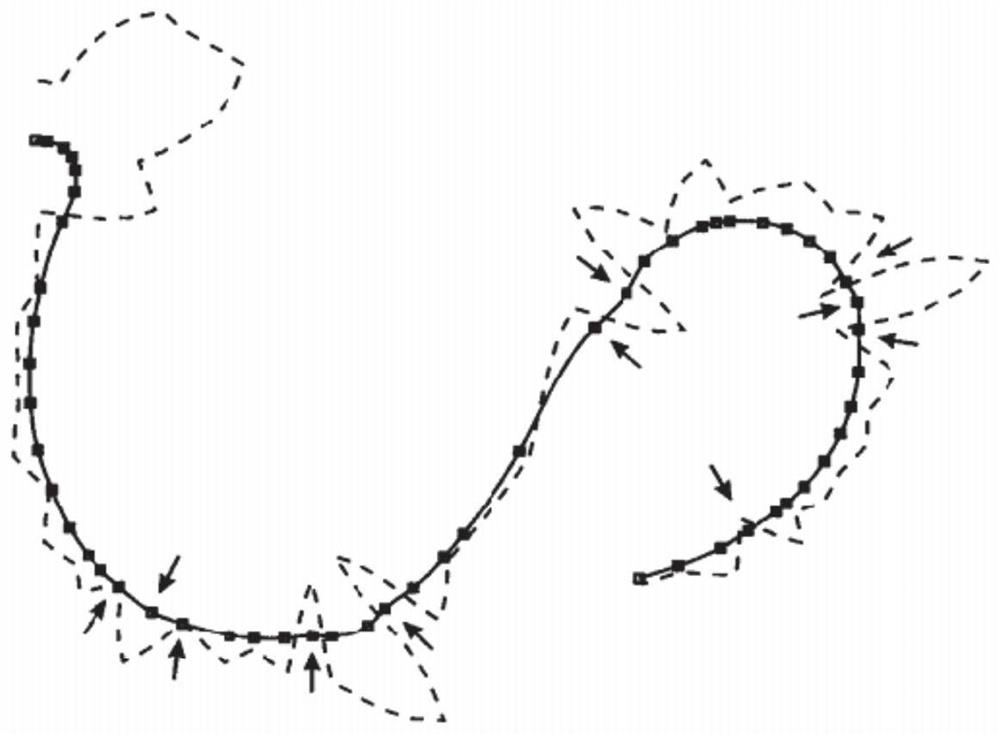
[0078] Step S4, performing feature point extraction on all input 3D point cloud data after filtering and denoising processing, so as to obtain sparse feature points;
[0079] Step S5, based on the applica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More