

Three-dimensional camera pose online calibration device and method for industrial robot
An industrial robot and three-dimensional technology, which is applied in the testing of machines/structural components, measuring devices, instruments, etc., can solve the problems of low precision, cumbersome process, and long time consumption, and achieve reduction of edge noise, simple calibration process, The effect of ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, where the schematic embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
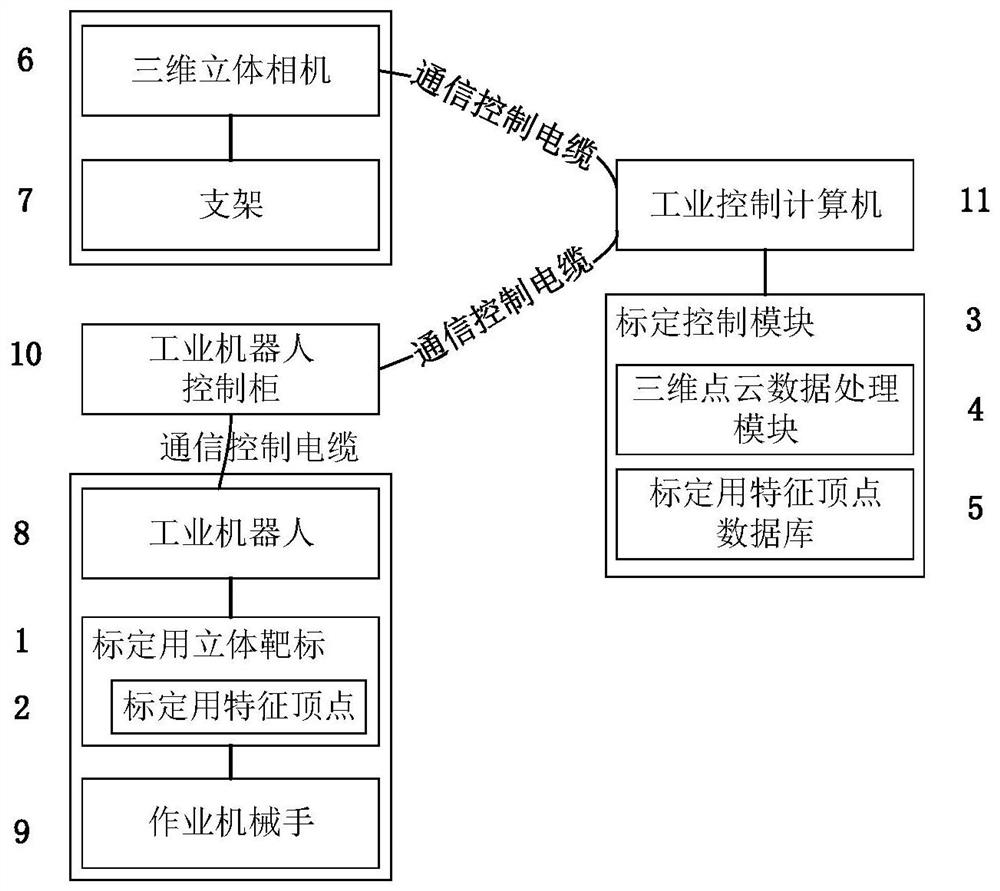
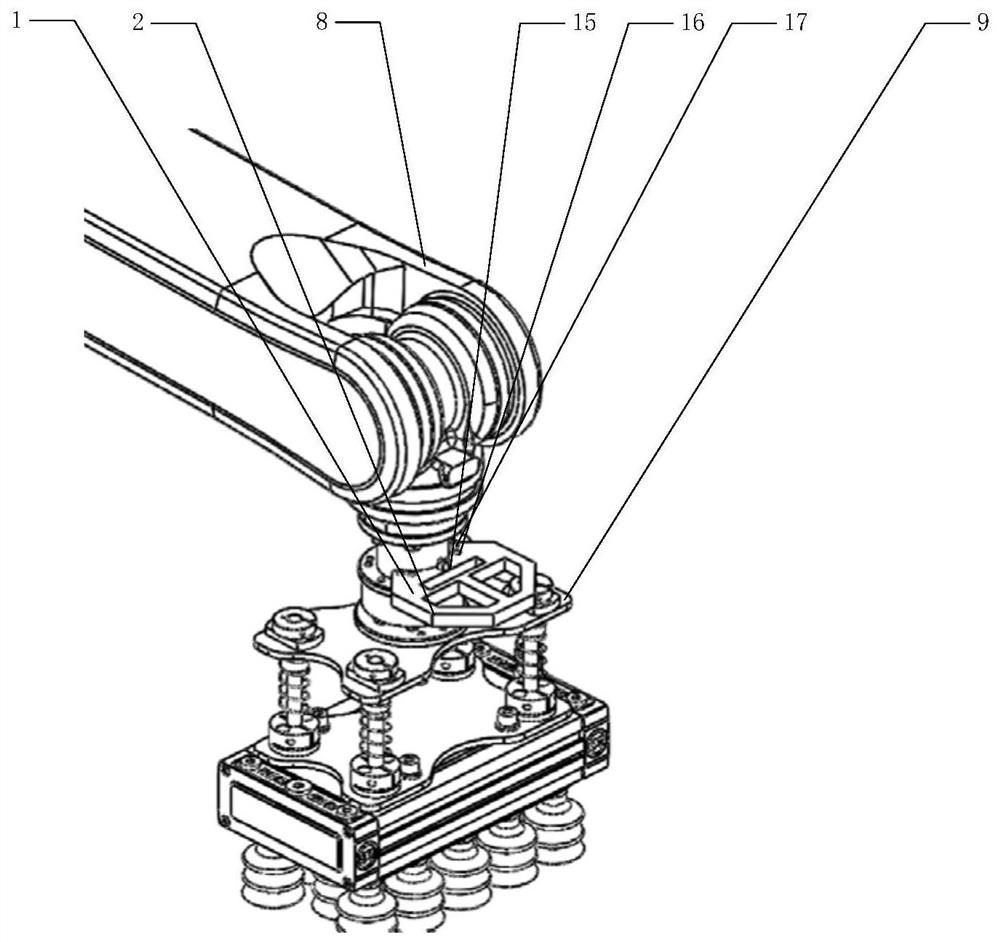
[0063] Such as figure 1 , Figure 2a , 2b As shown, a three-dimensional camera position and posture online calibration device for intelligent industrial robots, including a calibration stereo target 1, a calibration feature vertex 2 on the calibration stereo target 1, a calibration control module 3, and a calibration control module 3 The three-dimensional point cloud data processing module 4 and the characteristic vertex database 5 for calibration in the calibration control module 3.
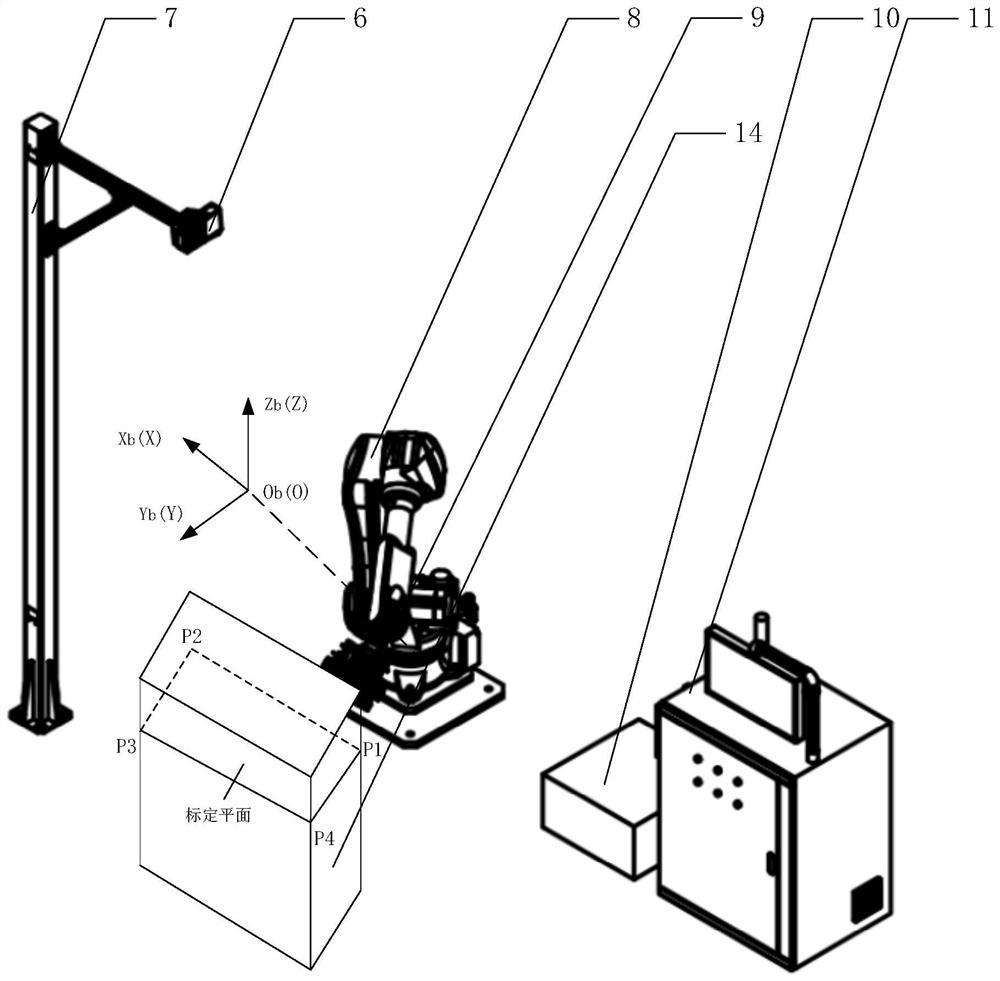
[0064] Such as Figure 2a As shown, a schematic structural diagram of a three-dimensional camera pose online calibration device for intelligent industrial robots is shown, including a three-dimensional s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More