

Intelligent automobile high-precision positioning and space-time situation safety method based on multi-sensor fusion
A multi-sensor fusion and smart car technology, which is applied in the direction of navigation through speed/acceleration measurement, can solve the problems of characterization of driving safety risks, poor accuracy, and poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0144] see Figure 1 to Figure 14 Shown:
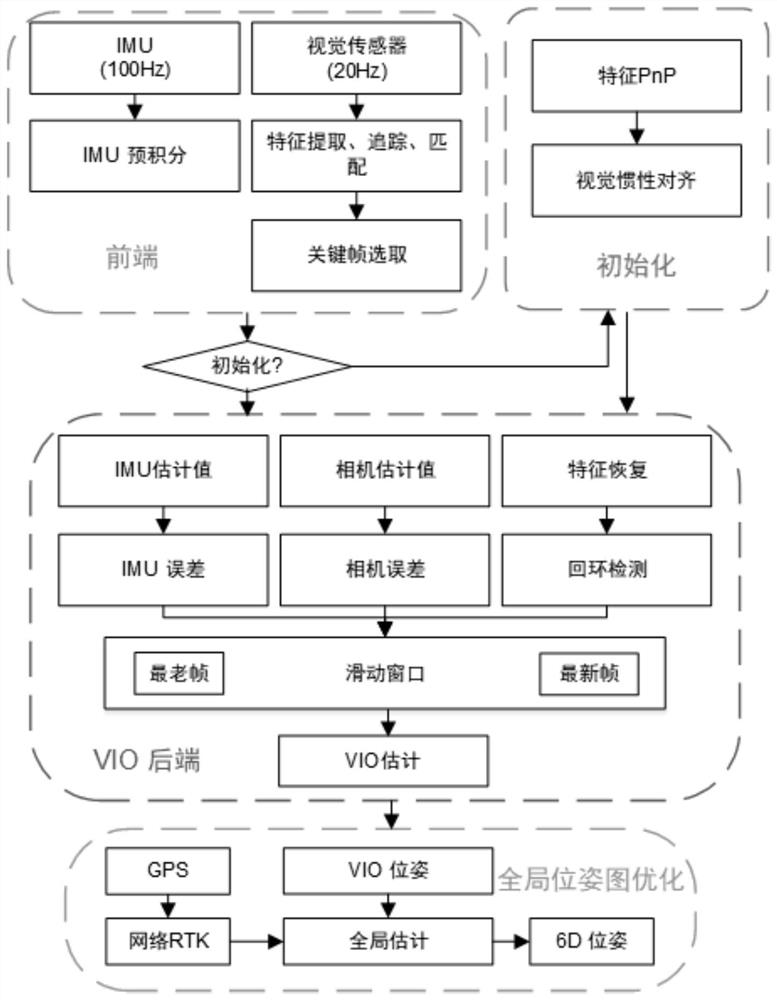
[0145] The high-precision positioning and space-time situation security strategy for smart cars based on multi-sensor fusion provided by the present invention includes two strategies: a high-precision positioning strategy and a space-time situation security strategy. The high-precision positioning strategy includes four parts: preprocessing, visual-inertial odometry front-end and initialization, visual-inertial odometry back-end optimization, and global pose graph optimization.
[0146] 1. Preprocessing is as follows:
[0147] 1. Camera calibration
[0148] Using a plane black and white checkerboard of known size as a calibration reference, a series of pixel points are extracted by adjusting the distance and angle between the camera and the checkerboard, so that the coordinates of the corresponding pixel points in the image at the intersection of the black and white lines can be found. Assume that the world coordinates of the inter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More