

Oceanographic engineering complex node multi-robot welding cooperative control method
A marine engineering and multi-robot technology, which is applied in the direction of program-controlled manipulators, welding equipment, manipulators, etc., can solve the problems that single-sided fillet welding cannot provide sufficient safety guarantees, cannot weld steel parts at the same time, and has low welding efficiency. The effect of simplifying control difficulty, improving welding quality, and solving deformation problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
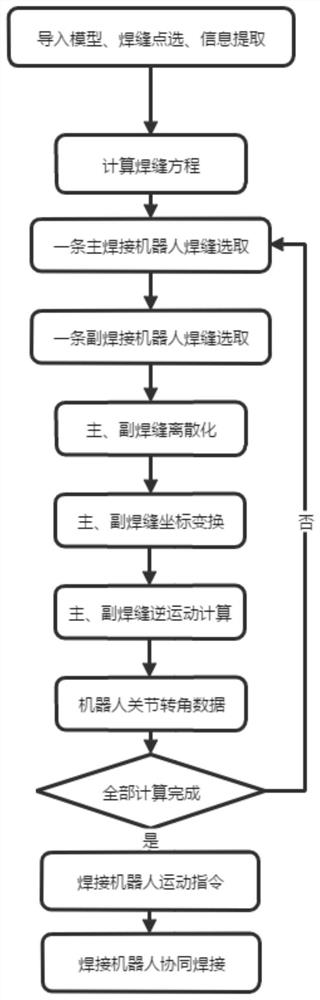
[0025] Such as figure 1 As shown, the multi-robot welding collaborative control method for complex nodes in ocean engineering of the present invention includes the following steps:
[0026] Step 1. Select the welding method of any two parts to be welded in the 3D model of the complex node of the marine engineering. The specific process is as follows: fix the two long sides of the first part to be welded on the second part to be welded respectively At the set position of the weldment, a welding place consisting of two linear welding positions (that is, the two long sides of the first workpiece to be welded) is formed between two to-be-welded pieces, and each to-be-welded piece The two positions to be welded at the welding place are welded by welding robots at the same time to form two linear welds;
[0027] Step 2. Click and select two weldi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More