Vehicle reference trajectory tracking method and system
A technology that refers to trajectories and vehicles. It is applied to vehicle components, steering mechanisms, and control devices. It can solve problems such as large amount of calculation, prolonged development cycle, and too many formulas, so as to achieve the effect of prolonging development cycle, ensuring safety, and shortening development.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0152] Based on Embodiment 1 of the present invention, Embodiment 2 of the present invention provides a vehicle reference trajectory tracking system, including:
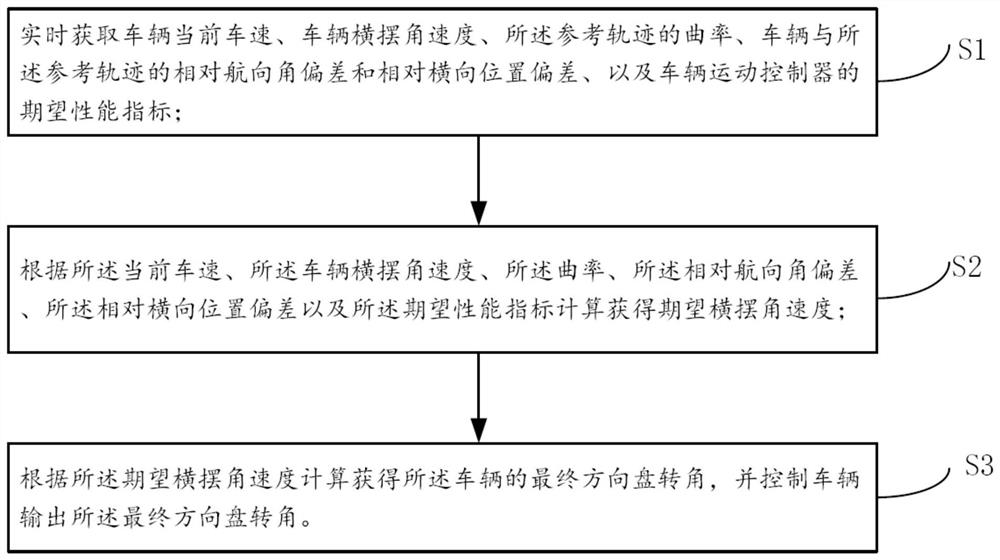
[0153] An acquisition unit, configured to acquire in real time the current vehicle speed of the vehicle, the yaw rate of the vehicle, the curvature of the reference trajectory, the relative heading angle deviation and the relative lateral position deviation between the vehicle and the reference trajectory, and the expected performance index of the vehicle motion controller;
[0154] An expected yaw rate calculation unit, configured to calculate and obtain an expected yaw according to the current vehicle speed, the vehicle yaw rate, the curvature, the relative heading angle deviation, the relative lateral position deviation and the expected performance index angular velocity;
[0155] A final steering wheel angle calculation unit, configured to calculate and obtain the final steering wheel angle of the vehicle accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More