

Road surface height real-time estimation method in vehicle driving process
A vehicle driving and height estimation technology, which is applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of inability to estimate the exact height of the road surface in real time, inability to install, high cost, etc., to achieve wide application range, high precision, The effect of theoretical maturity
Active Publication Date: 2021-03-19
HARBIN INST OF TECH
View PDF5 Cites 2 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Among them, CN202511783U discloses a direct measurement method based on a road surface profile measuring instrument. The data collected by displacement sensors and the like can be used to measure the longitudinal and transverse road surface profiles, but all parts of the measuring instrument need to be integrated on a cart. The volume is too large to be installed in the vehicle
CN109564682A discloses a method for estimating road surface shape based on images taken by a camera, and CN108955584A discloses a method and device for estimating road surface undulations according to the vertical height and horizontal distance between the laser radar and the scanned point, but the above method needs to be installed on the vehicle Installing a camera or lidar to obtain road surface information is costly
CN110001335A proposes a road surface recognition technology based on suspension dynamic stroke, and CN106985627A proposes a road surface recognition technology based on suspension dynamic stroke and suspension sprung and unsprung mass acceleration signals, but the above methods are all based on statistical laws, It is only suitable for identifying the level of a continuous road surface, but for discrete impact road surfaces and continuous long-wave road surfaces like speed bumps, it is impossible to estimate the accurate height of the road surface in real time
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
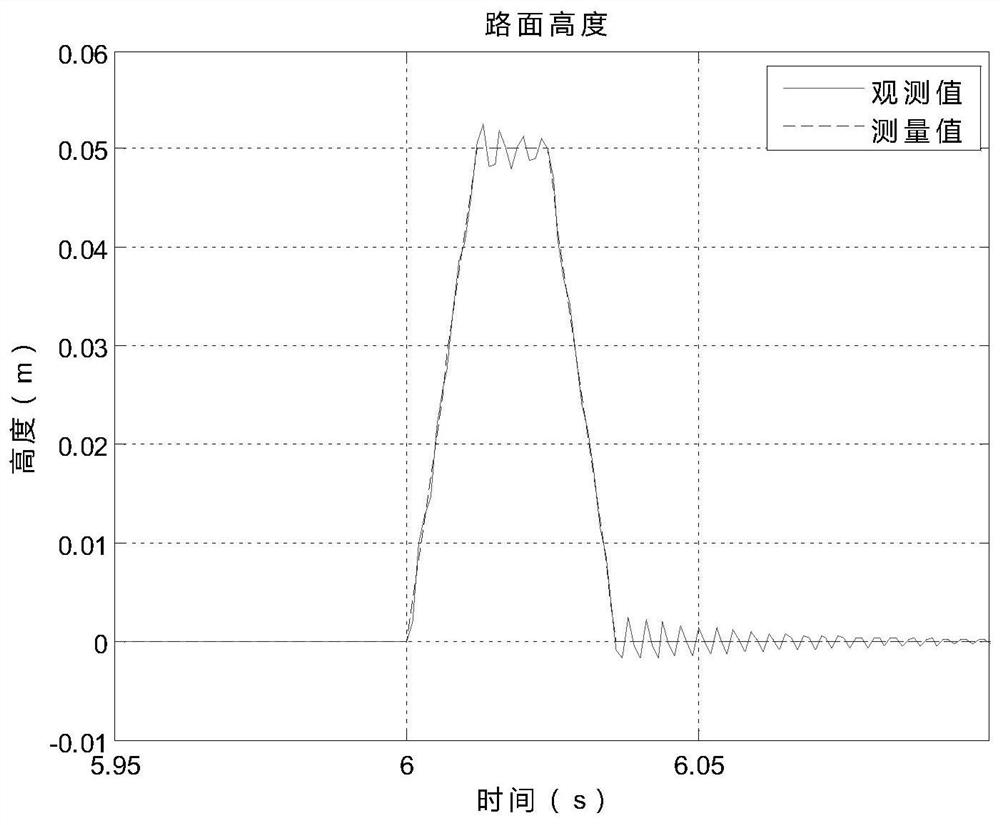
[0182] According to the design requirements of the vehicle suspension and combined with the expected simulation results, the simulation operation parameters and the feedback gain and sliding mode gain of the observer are designed.
[0183] The designed simulation running parameters and observer gain are as follows:
[0184] m s =283.7kg,m u =37.6kg,k s =18500N / m,k t =180000N / m,
[0185] c pmin =1500N / m,c pmax =3000N / m,α'=70.5°,θ 0 = 2°,
[0186] l A =0.6257m,l B =0.3232m,l C =0.3742m, η=0.001.
[0187]
[0188]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
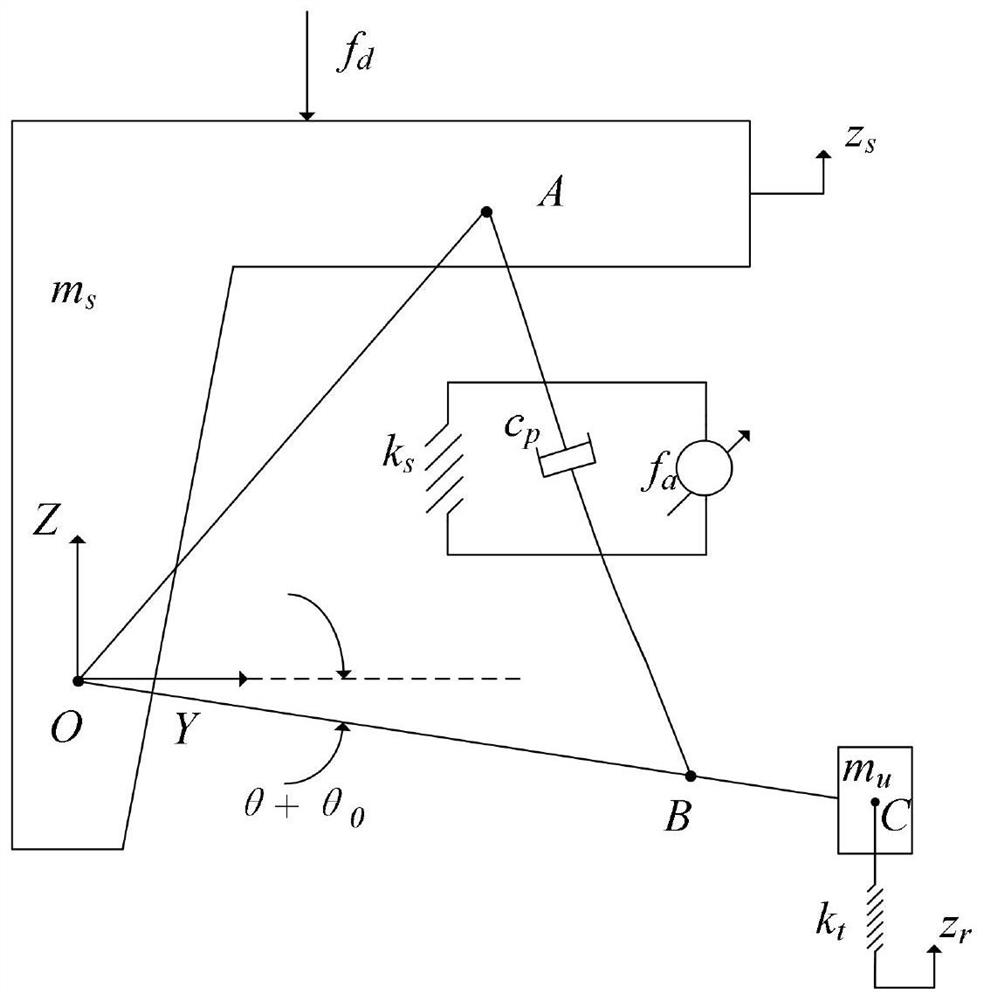
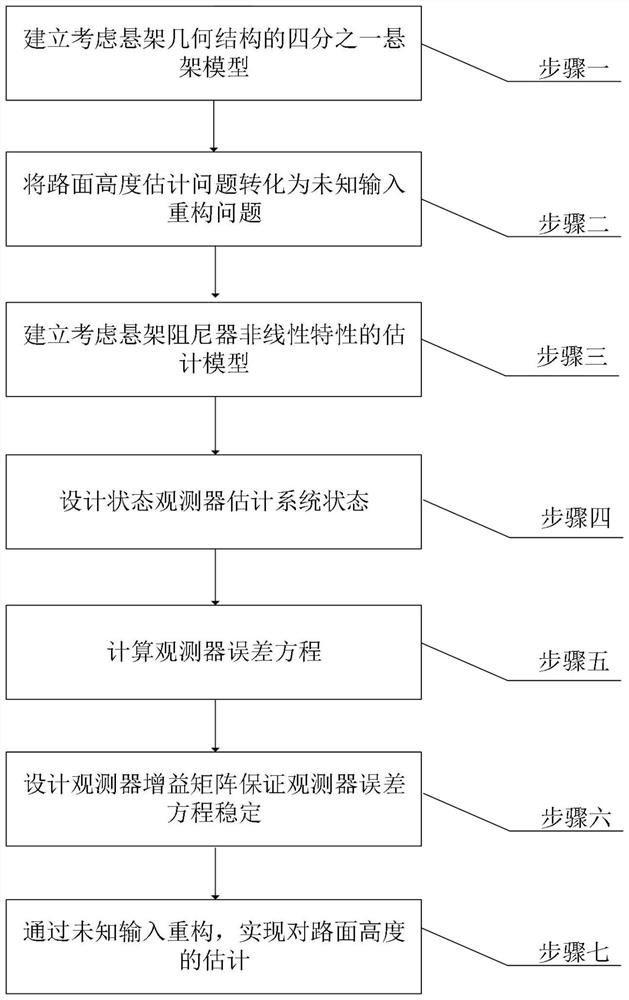
The invention discloses a road surface height real-time estimation method in a vehicle driving process. The method comprises the following steps of: 1, establishing a quarter suspension model considering a suspension geometric structure; 2, converting a road surface height estimation problem into an unknown input reconstruction problem; 3, establishing an estimation model considering the nonlinearcharacteristics of a suspension damper; 4, designing a state observer to estimate a system state; 5, calculating an observer error equation; 6, designing an observer gain matrix to ensure the stability of the observer error equation; and 7, estimating the road surface height through unknown input reconstruction. The influence of the suspension geometric structure and the nonlinear characteristicof the damper are considered, a linear variable parameter model of the suspension system is established, a sliding mode observer is designed, and real-time estimation of the road surface height underdifferent road surface conditions is achieved. Meanwhile, the sensors required by the invention are all existing sensors on the vehicle, so that the cost of the system can be reduced on the premise ofensuring the road surface height estimation precision.
Description
technical field [0001] The invention belongs to the technical field of automobile control, and relates to a method for real-time estimation of road surface height during vehicle driving, in particular to a method for real-time estimation of road surface height using suspension dynamics and considering the influence of suspension geometric structure and damper nonlinear characteristics . Background technique [0002] With the rapid development of vehicle control technology, people's requirements for vehicle handling stability and ride comfort are increasing day by day. When the vehicle is running on a bumpy road or a continuous bumpy road, the impact caused by the change of the road surface height will bring discomfort to the passengers, affect the comfort of the vehicle, and even affect the handling stability and driving safety of the vehicle. Therefore, for the vehicle motion control system, it is expected to accurately estimate the height of the road surface during vehicl...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05B13/04
CPCG05B13/042
Inventor 赵林辉高士金刘志远
Owner HARBIN INST OF TECH