

Mature pomegranate positioning method based on Mask R-CNN and three-dimensional sphere fitting
A positioning method and pomegranate technology, which are applied in neural learning methods, 3D modeling, image data processing, etc., can solve the problems of inconvenient sensors, less research on fruit completion, and difficult and practical three-dimensional information, so as to achieve the effect of convenient positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
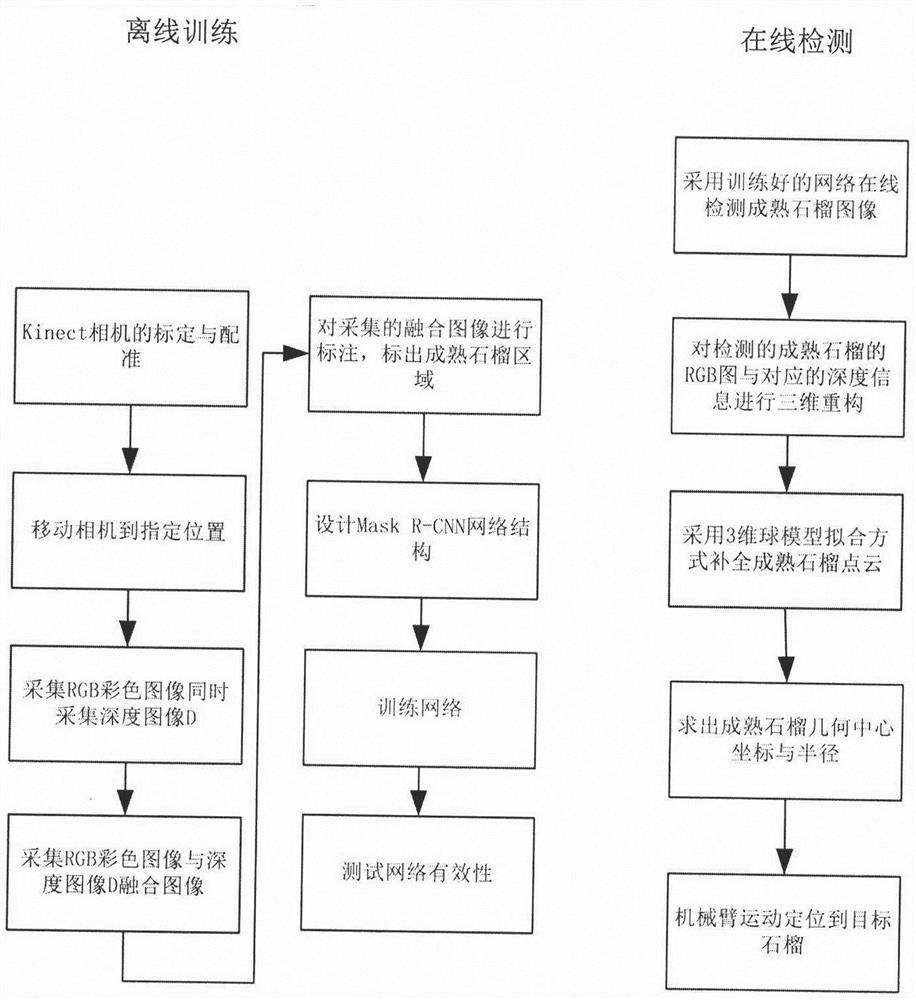
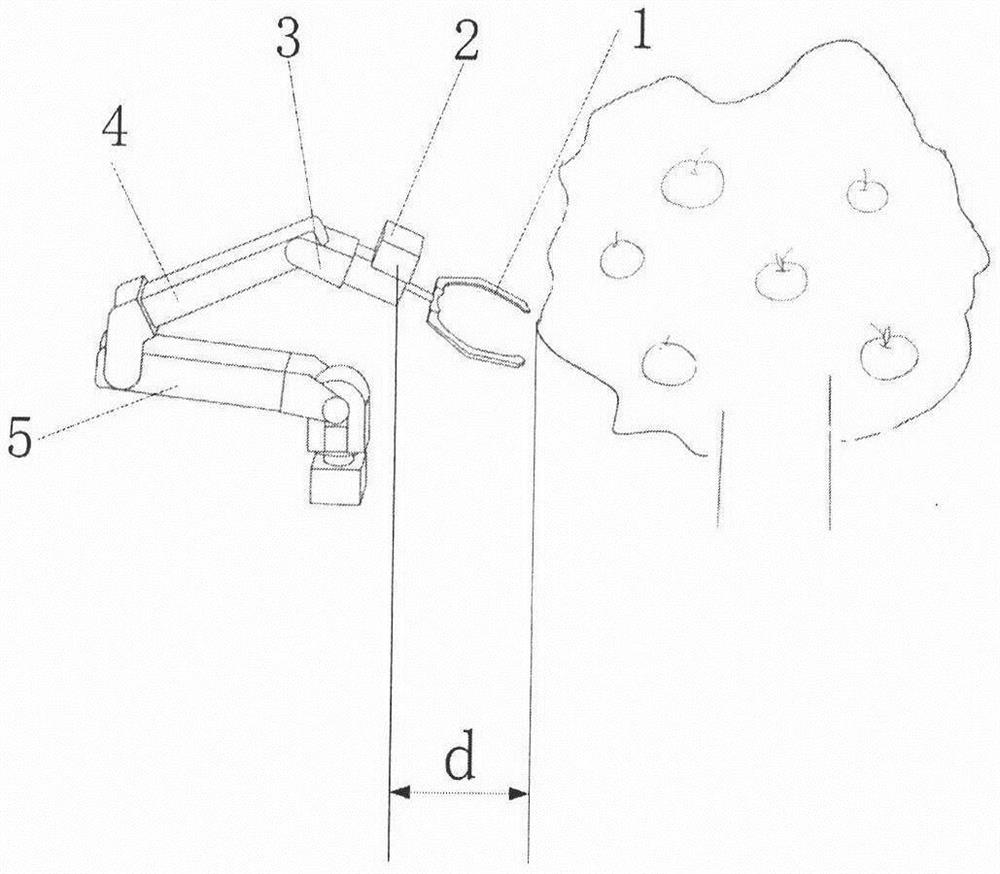
[0048] Step 1, use the Kinect V2 camera to obtain the color and depth images of the pomegranate in the greenhouse, such as figure 2 The camera 2 in the image is installed at the front end of the robotic arm 3. In order to better integrate the RGB-D image features, the RGB image and the depth image D are calibrated before collecting image data, so that the depth image and the color image are aligned.
[0049] Step 1.1: The intrinsic parameter matrix of the RGB image obtained by Zhang Dingyou's camera calibration method is K rgb , the intrinsic parameter matrix of the depth image is K d , combined with the same checkerboard image, the external parameter matrix of the obtained RGB image is R rgb and T rgb , the external parameter matrix of the depth image is R d and T d .
[0050] Step 1.2: The internal parameters of the color and depth cameras are K respectively rgb , K d , assuming that the pixel coordinates of the color image are P rgb =[U rgb , V rgb ,1] T , the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More