Underwater robot walking mechanism
An underwater robot and walking mechanism technology, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., can solve problems such as affecting work efficiency and progress, unable to complete tasks, and robots getting stuck, and achieve the effect of improving buoyancy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
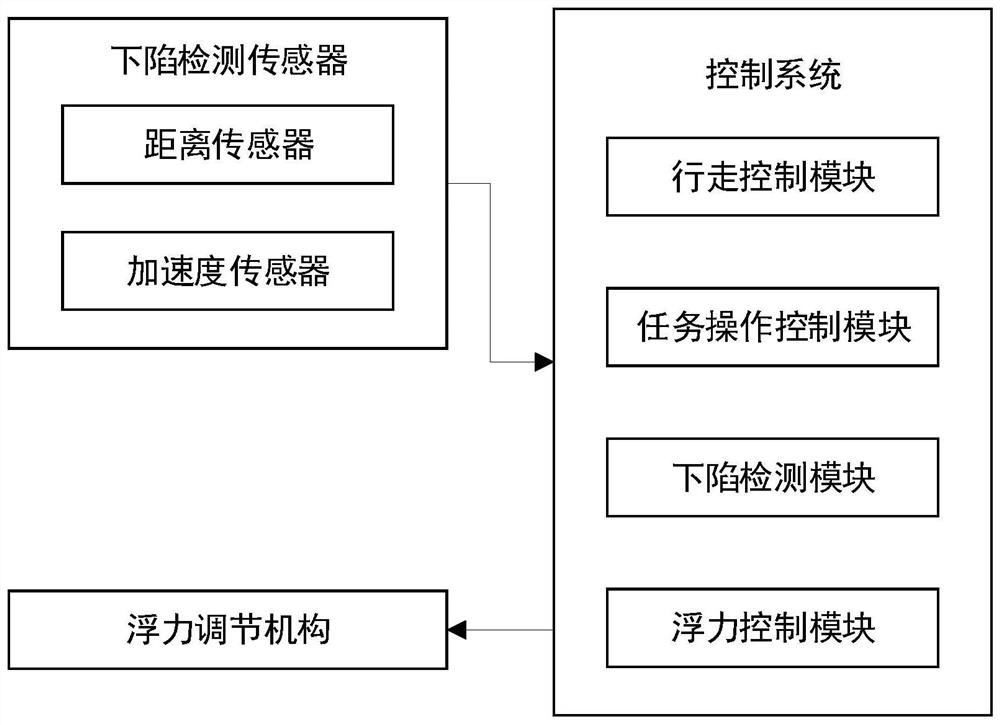
[0023] The walking mechanism of the underwater robot in this embodiment includes a chassis, and the chassis is provided with a four-legged walking mechanism, a buoyancy adjustment mechanism and an electric control system.
[0024] The multi-legged walking mechanism is used to drive the chassis to move. The multi-legged walking mechanism includes several walking feet. In this implementation, four walking feet are used. The walking feet are designed with reference to the prior art, and include a plurality of foot segments. A steering gear is arranged on the hinge shaft to control the rotation of the foot joints, and walking is realized through the rotation and cooperation of the foot joints of a plurality of walking feet.
[0025] There is a sag detection sensor on the walking foot, the sag detection sensor is connected with the control system signal, and the sag detection sensor is used to send the detection data to the control system; in this implementation, the sag detection s...
Embodiment 2
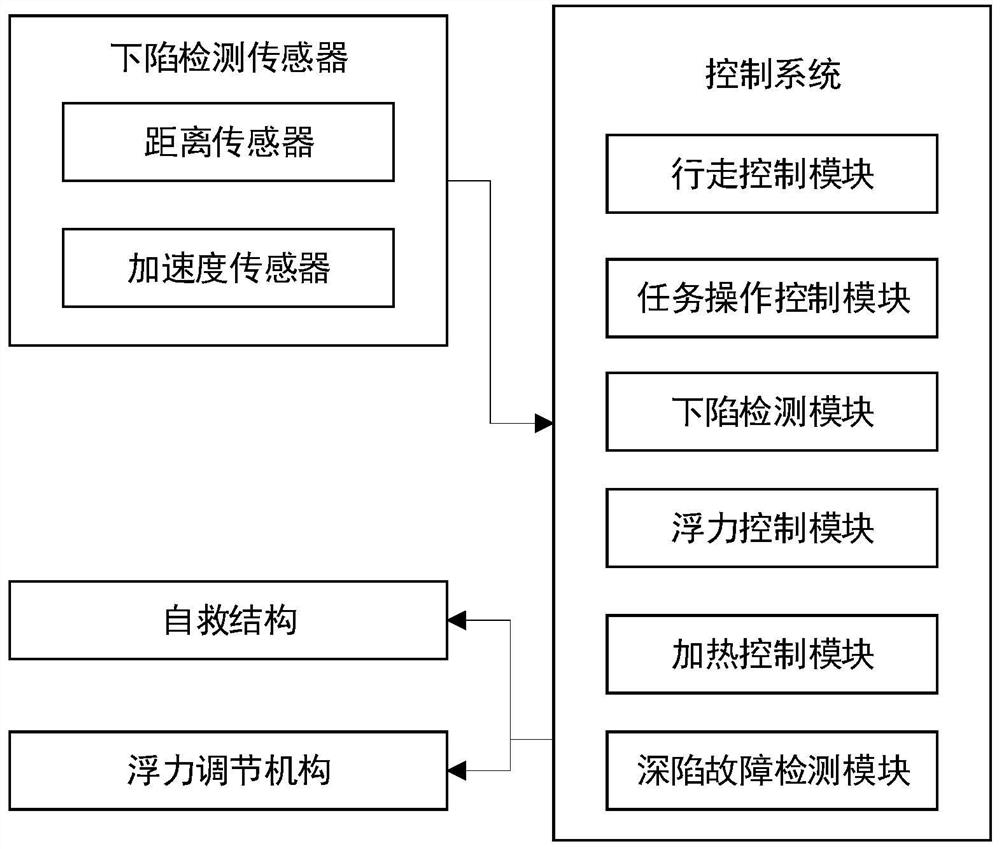
[0032] like figure 2 As shown in the figure, the difference between this embodiment and the first embodiment is that in this embodiment, a self-rescue structure is also included, and the self-rescue structure includes a compressed air bag and a gas generating device. , sodium azide, potassium nitrate and silicon dioxide, the compression airbag is communicated with the shell, in this implementation, the shell is provided with a reaction chamber and a discharge pipe communicated with the reaction chamber, heater, sodium azide, potassium nitrate and The silicon dioxide is arranged in the reaction chamber, the phosphor is arranged in the discharge pipe, the two ends of the discharge pipe are provided with sealing films to isolate the phosphor powder, the discharge pipe is connected to the compressed air bag, the heater is connected with the signal of the control system, and the control system also includes a deep fault The detection module, the deep-sinking fault detection module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com