

Action assisting device based on surface myoelectricity and action intention identification method
A motion assisting device and myoelectric technology, applied in character and pattern recognition, passive exercise equipment, medical science, etc., can solve the problem that mechanical information cannot directly reflect the user's movement intention, cannot collect mechanical information, and misleads the judgment of movement intention, etc. problem, to achieve the effect of increasing battery life, simplifying the processing flow, and eliminating the self-locking return gap
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described in conjunction with the accompanying drawings, but not as a limitation of the present invention.
[0066] In a specific embodiment, the electrode pads are arranged on the user's body, and the user's surface electromyographic signal is collected as a bioelectric signal. Three electrode pads are designed, of which No. 1 electrode sheet and No. 3 electrode sheet Collect the user's surface electromyographic signal, and the No. 2 electrode sheet is used as a reference motor to prevent the absolute voltage of the electromyographic signal from exceeding the working range of the instrument amplifier.
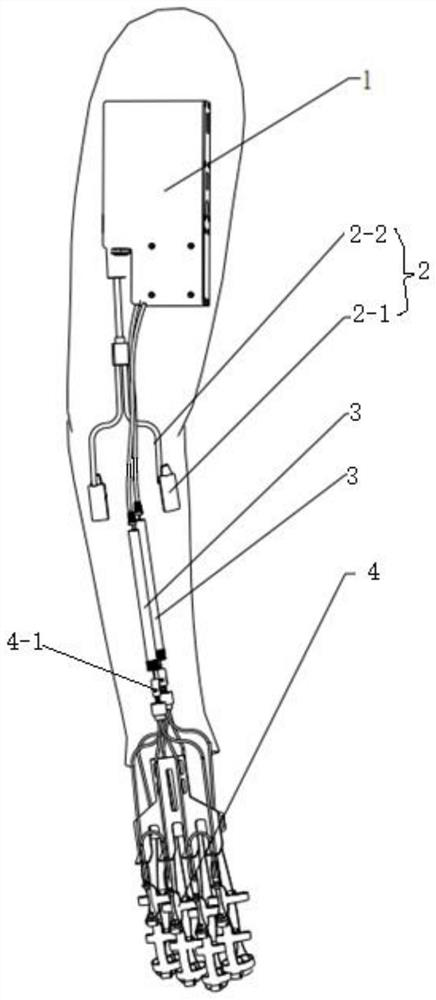
[0067] see figure 1 , in a specific embodiment, a hand motion assisting device based on a wire drive is designed, which is characterized in that it includes: a sensing unit 2, a driving unit 1, a driving wire tube 3, and a hand exoskeleton 4;
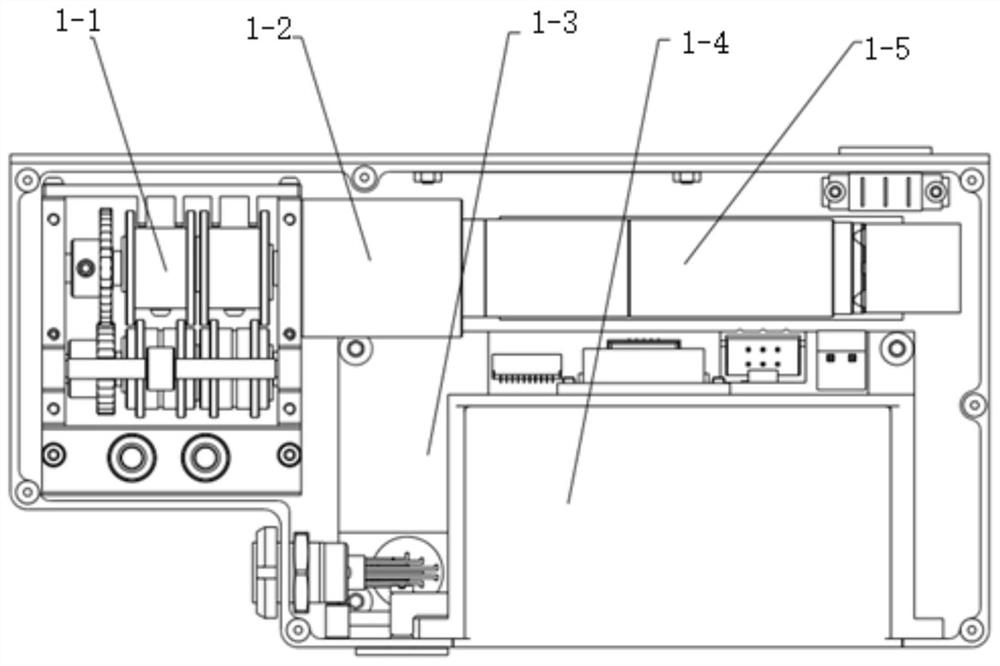
[0068] see figure 2 , a drive unit 1, including a transmission mechanism 1-1, a self-l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More