

Joint replacement surgical robot navigation and positioning system and method
A surgical robot, navigation and positioning technology, applied in the field of joint replacement surgery robot navigation and positioning system, can solve the problems of high incidence of postoperative complications, poor repeatability, cumbersome operation, etc., to improve the success rate of surgery, reduce injury, bleeding little effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
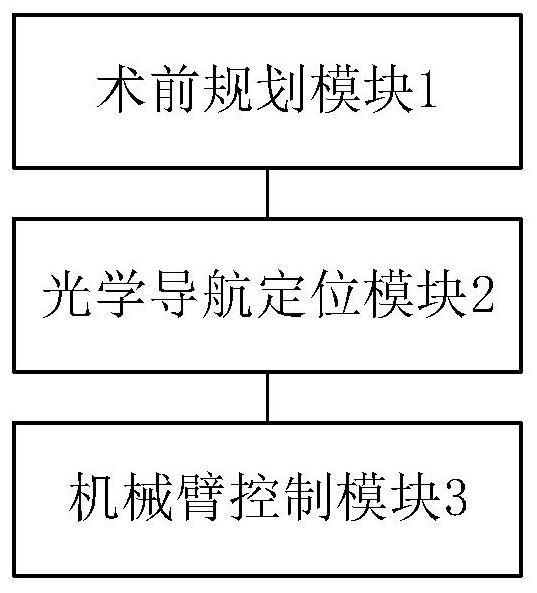
[0064] figure 1 It shows a structural schematic diagram of a navigation and positioning system for a joint replacement surgery robot provided by an embodiment of the present invention. The following combines figure 1 The navigation and positioning system for the joint replacement surgery robot provided by the embodiment of the present invention is explained in detail.
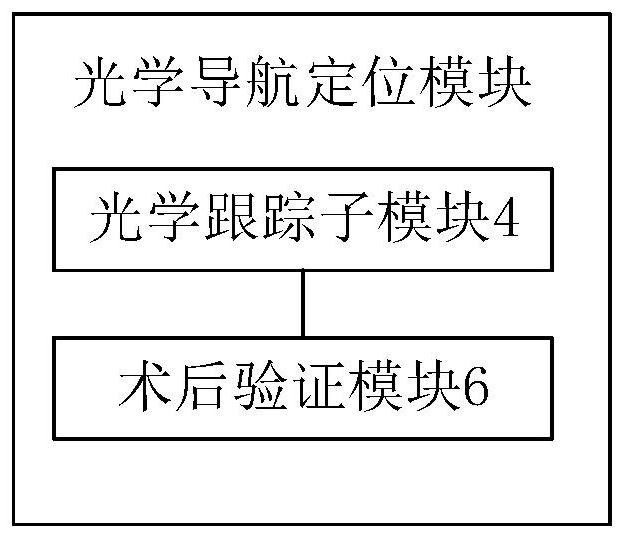
[0065] Such as figure 1 As shown, a robot navigation and positioning system for joint replacement surgery provided by an embodiment of the present invention includes: a preoperative planning module 1, an optical navigation and positioning module 2, and a robotic arm control module 3;
[0066] The pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More