

A humanoid robot control method, device, computer equipment and storage medium
A technology of a humanoid robot and a control method, which is applied in the fields of a humanoid robot control method, computer equipment, storage media, and devices, and can solve the problems of low flexibility, low adaptability, and low stability of a humanoid robot, and achieve improved flexibility. stability and stability, and the effect of simplifying the planning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
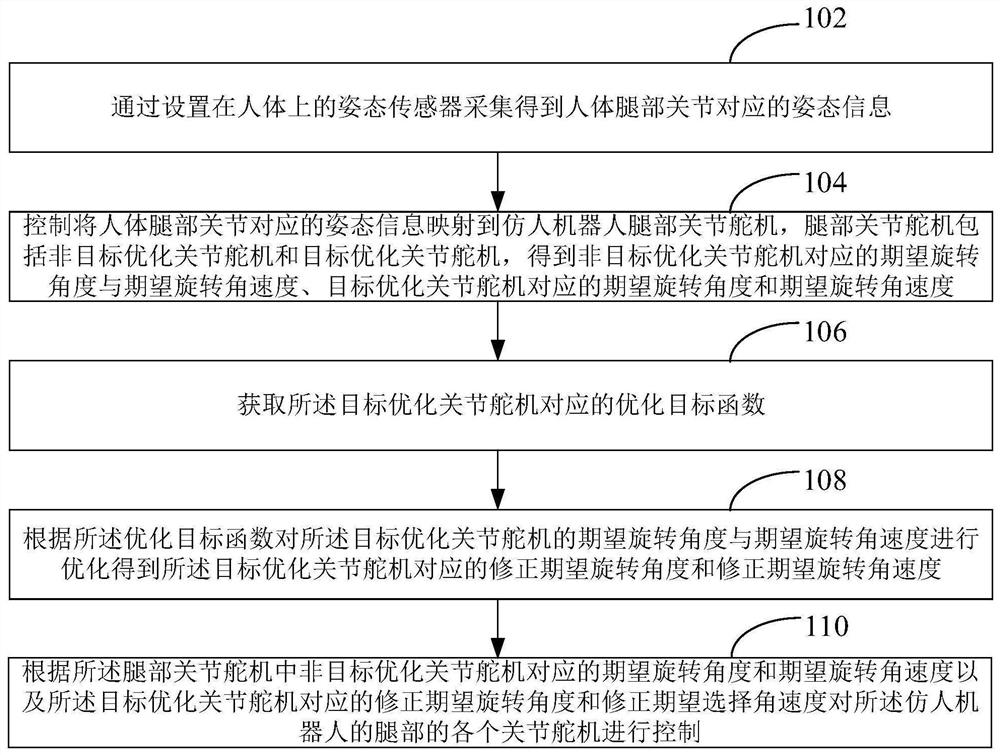
[0028] Such as figure 1 As shown, the present invention proposes a kind of humanoid robot control method, and this method comprises:
[0029] In step 102, the posture information corresponding to the leg joints of the human body is collected by the posture sensor installed on the human body.
[0030] Among them, the attitude sensor adopts MEMS inertial sensor, which can capture the attitude information of the target in real time. This patent focuses on the research of leg motion capture and imitation. Compared with arm motion imitation, leg motion imitation needs to consider not only motion mapp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More