

A fusion registration method based on image data and point cloud data
A technology of point cloud data and image data, applied in image data processing, image analysis, image enhancement, etc., can solve the problems of different non-rigid models of point cloud data and image data, difficulty, and variable scale of point cloud data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
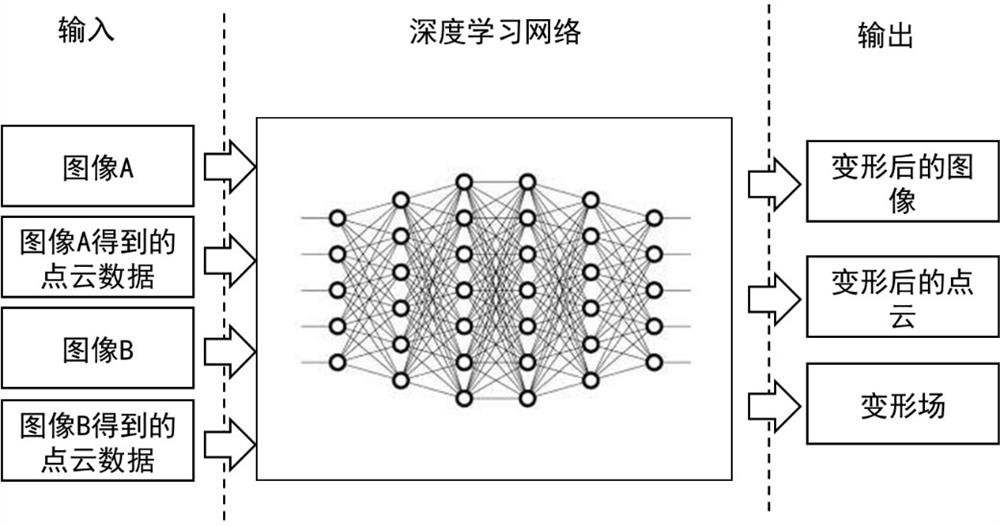
[0027] Such as figure 1 It is a schematic diagram of fusion registration based on image data and point cloud data in the present invention, by constructing a fusion registration model, and simultaneously inputting images and point cloud data of images for registration, the method specifically includes the following steps:
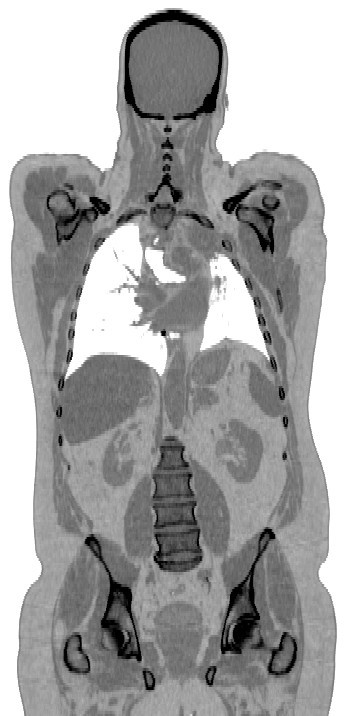
[0028] Step 1: Acquire CT images of a large number of patients (such as image 3 shown) data, and obtain the corresponding tracheal tree point cloud through image segmentation, such as Figure 4 shown;
[0029] Step 2: Perform data processing such as denoising, smoothing, and simplification on the tracheal tree point cloud, and make the scale of the point cloud data the same; the point cloud simplification refers to a method of controlling the data scale by deleting data that contributes less to the shape The processing method can be realized by curvature reduction or cluster reduction; Figure 5 Shown is the simplified point cloud data;
[0030] Step 3...
Embodiment 2
[0039] Step 1: Use digital human technology to obtain a large amount of CT image data, and obtain feature points in the image through feature extraction, where feature extraction can use SIFT or MIND methods;
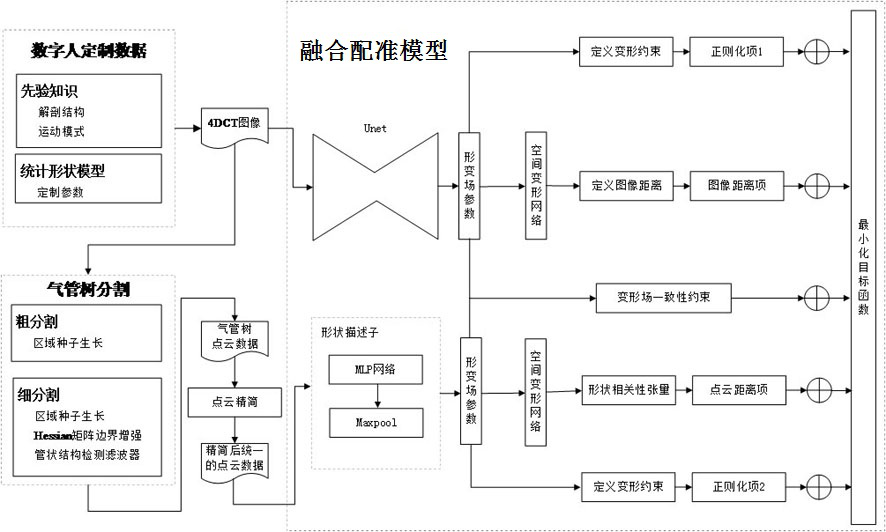
[0040] Step 2: Design as figure 2 The fusion registration model shown, the objective function of the fusion registration model is composed of image distance item, point cloud distance item, image deformation field regularization item, point cloud deformation field regularization item and deformation field consistency constraint item;
[0041] Step 3: Input the CT image obtained in step 1 to form a reference image, a floating image pair, and the corresponding simplified point cloud into the fusion registration model obtained in step 3 for training, so that the loss function converges and stabilizes, and the fusion registration is completed model training;
[0042] Step 4: Use the trained fusion registration model to register the floating image to be registered:
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More