

Multi-arm miniature magnetic control soft robot and motion monitoring and control method thereof
A robot and micro technology, applied in the direction of claw arms, manipulators, manufacturing tools, etc., can solve the problems of cumbersome preparation steps, poor control effect, and complex structure of micro magnetic control robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
preparation example Construction
[0046] The present invention also provides a preparation method of the multi-arm miniature magnetically controlled soft robot, which is characterized in that it comprises the following steps:
[0047] S1. Pour the liquid mixture obtained by uniformly mixing the magnetic particles and the soft material according to the preset ratio into a mold with a preset shape, and take it out after being completely solidified;
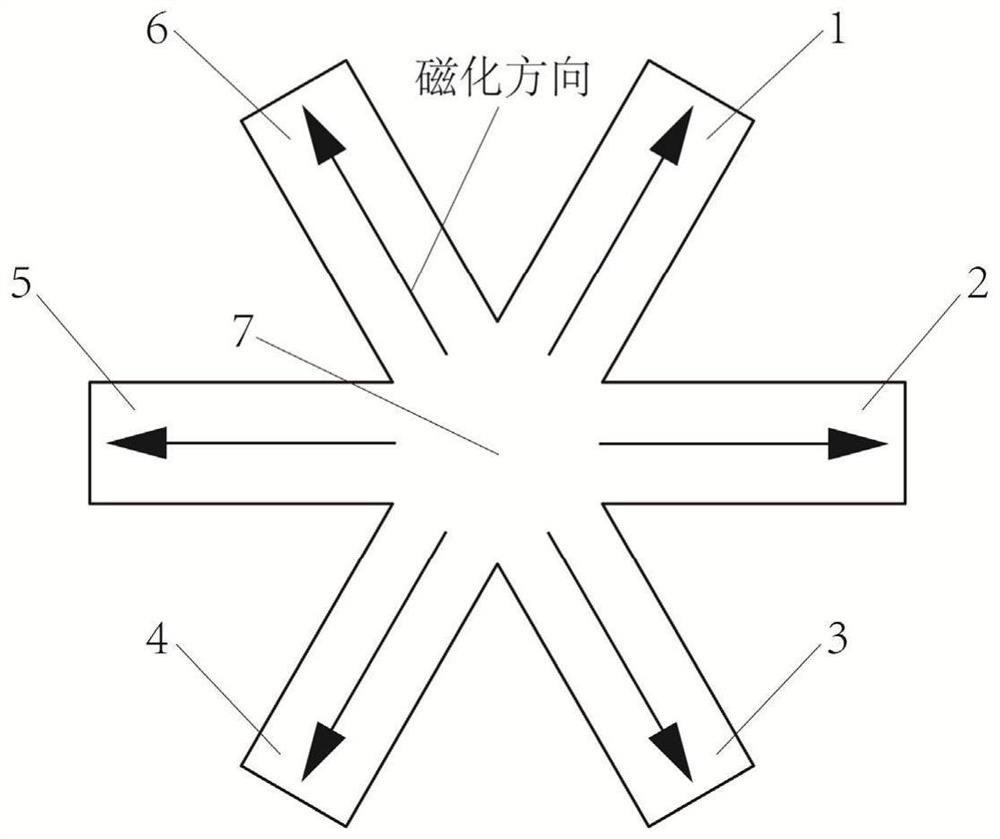
[0048] S2. Magnetize all the arms of the robot obtained through step S1, so that the magnetization directions are parallel to the plane where the arms are located when the robot is in a spread state, and are distributed along the radial direction.
[0049] In some embodiments, step S2 uses a magnetizer to magnetize the robot, puts the robot horizontally into the magnetizer, and sets the magnetizer to generate a radially distributed pulsed magnetic field to magnetize all arms.
[0050] In some other embodiments, the arm of the robot is radially magnetized using a dua...
specific Embodiment
[0068] Such as figure 1 As shown, the central part of the multi-arm miniature magnetically controlled soft robot is a regular hexagon 7 with a side length of 4 mm, and six strip arms 1 to 6 with a length of 10 mm and a width of 4 mm are evenly distributed around the periphery; the hexagon and the six arms are made as As a whole, the entire robot is made of a soft material formed by uniformly mixing and curing NdFeB particles with a diameter of 5 μm and silicone rubber, with a thickness of 0.8mm; each arm is magnetized, and the magnetization direction is parallel to the plane where the arm is located. Radial scattering distribution, the central polygonal area is not magnetized;
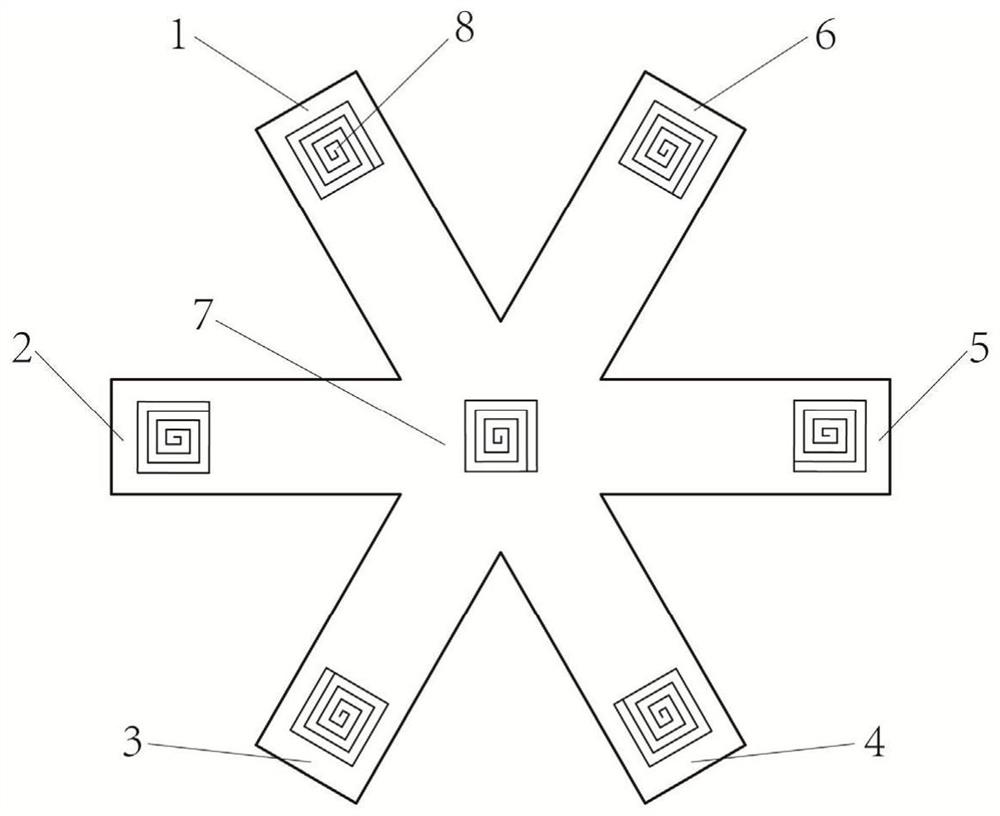
[0069] Such as figure 2 As shown, seven wireless miniature pressure sensors 8 are pasted on the central part 7 of the reverse side of the multi-arm miniature magnetically controlled soft robot and the outer ends of the arms 1-6, and its main components include a passive antenna, a ferrite film and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More