

Spatial positioning method and system
A space positioning and algorithm technology, which is applied in image data processing, instruments, calculations, etc., can solve the problem of decreased positioning accuracy, and achieve high-precision positioning, the required area for layout, small construction costs, and high positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
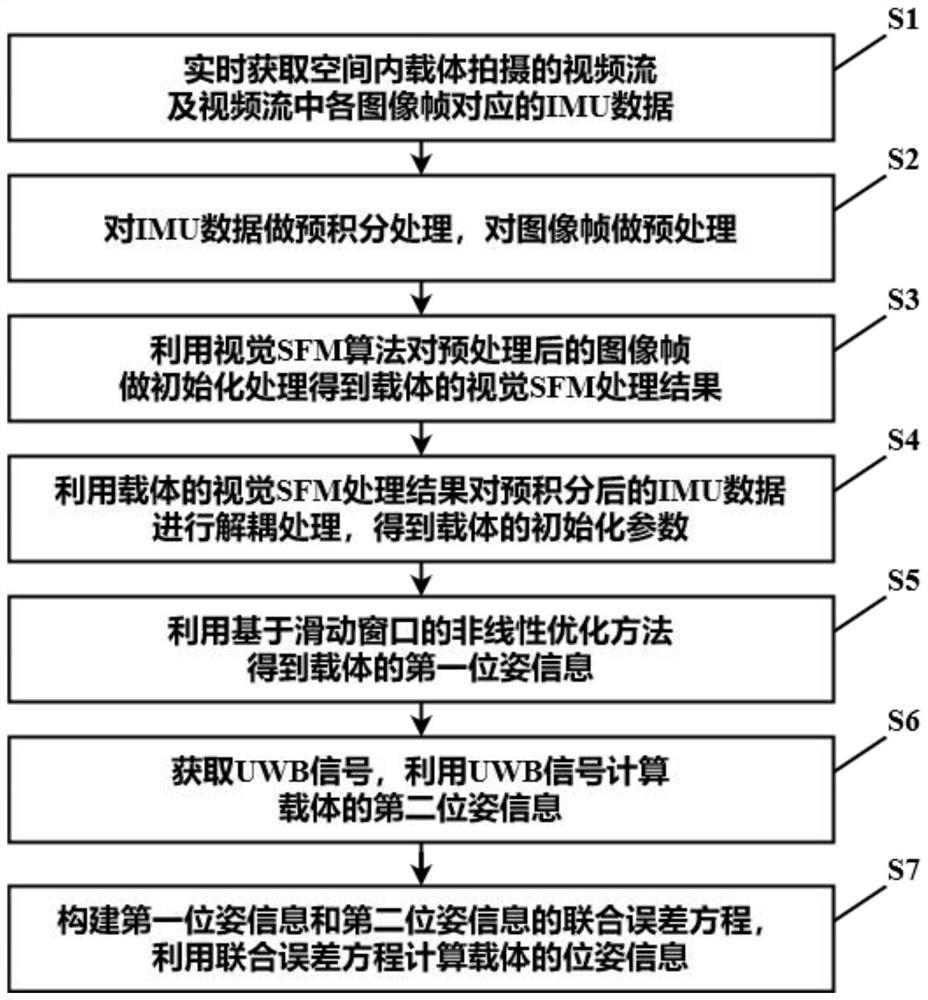
[0083] like figure 1 As shown, it is a flow chart of the spatial positioning method in Embodiment 1 of the present invention, and S1-S7 represent steps of the spatial positioning method.
[0084] Real-time acquisition of the video stream captured by the carrier 6 in the space and the IMU data corresponding to each image frame in the video stream;
[0085] Pre-integrate the IMU data and pre-process the image frame;
[0086] Using the visual SFM algorithm to initialize the preprocessed image frame to obtain the visual SFM processing result of the carrier 6;
[0087] Using the visual SFM processing results of the carrier 6 to decouple the pre-integrated IMU data to obtain the initialization parameters of the carrier 6;
[0088] Obtaining the first pose information of the carrier 6 by using a non-linear optimization method based on a sliding window;
[0089] Obtain the UWB signal, and use the UWB signal to calculate the second pose information of the carrier 6;
[0090] A join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More