

Trajectory tracking control strategy for distributed driving vehicle
A trajectory tracking and control strategy technology, applied in the direction of control devices, etc., can solve problems such as real-time performance, lack of reliability, different power sources, and inability to fully utilize the flexible control characteristics of new energy vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be described in further detail in conjunction with the following, so that those skilled in the art can implement it with reference to the description.
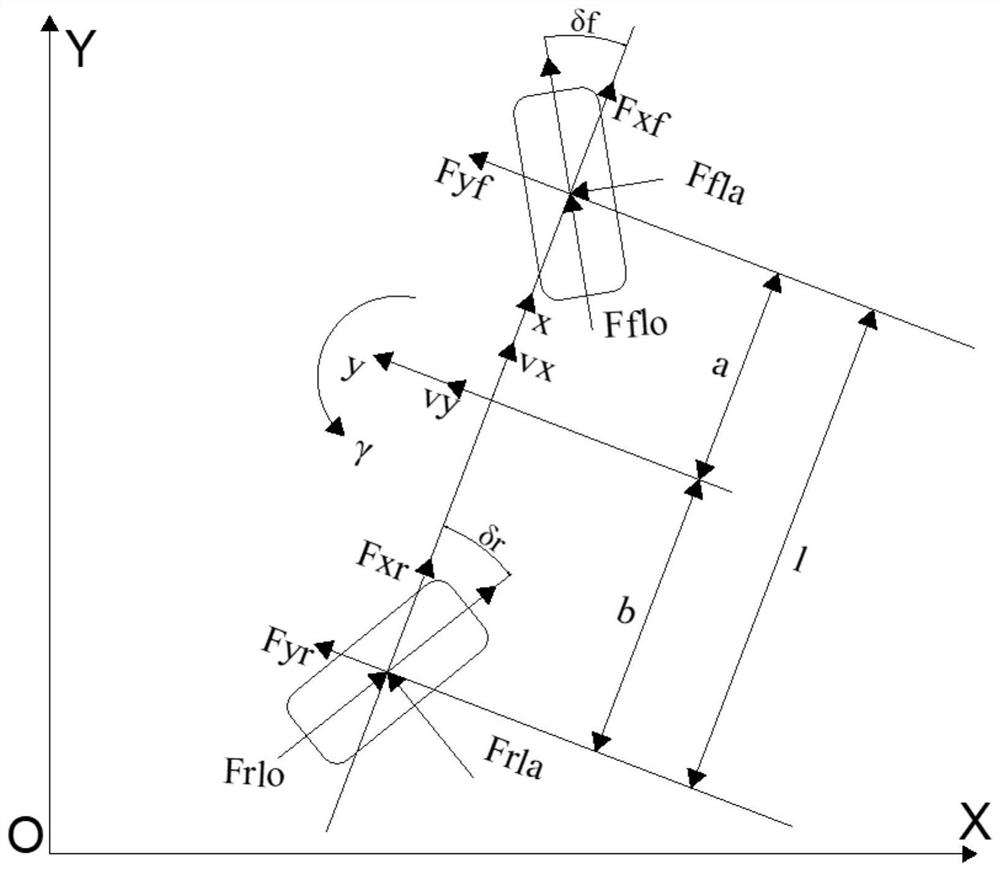
[0088] The trajectory tracking control strategy of a distributed drive vehicle provided by the present invention uses a four-wheel independent drive vehicle as a platform, and the four wheels of the four-wheel independent drive vehicle are independent, with many degrees of freedom, simple structure, flexible operation, and easy use of new energy. The vehicle is easy to control. At the same time, this vehicle is a strong nonlinear, over-coupled redundant control system. The actual model is extremely complex. The present invention mainly takes trajectory tracking as the main goal, and the closeness between the mathematical model and the actual model After the degree reaches a certain level, it will no longer have a significant impact on the control effect. Therefore, the closer the mathematical m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More